Traceable Radiometry Underpinning Terrestrial- and Helio-Studies (TRUTHS): An Element of a Space-Based Climate and Calibration Observatory

Abstract
:
1. Introduction
2. Mission Concept
2.1. Mission Overview
2.2. Mission Objectives
- datasets of sufficient accuracy needed to observationally detect the signals of climate change (in the solar reflective domain) in the shortest possible time. Needed to critically test climate models and attribute the effects of climate change to geophysical processes by providing Top of the Atmosphere (ToA) measurements of incoming and reflected total and spectrally resolved solar radiation appropriately sampled and with uncertainties optimised to minimise time to detect a trend and consistent with goals of GCOS specified requirements.
- the means to upgrade the performance of the EO system through delivery of an operational high accuracy L1 nadir-looking hyperspectral Earth-reflected radiance product with sufficient spatial (~50 m (Goal)), spectral (<8 nm), accuracy (Goal 0.3%, k = 2), and agility that allows it to match (or address) the observational radiometric characteristics of a wide range of Earth viewing sensors so that it can validate and/or upgrade their calibration by ‘reference calibration’ (Cal) from space, primarily to address climate measurement needs.
2.3. Mission Products and Requirements: Summary
2.3.1. Climate ‘Top-Level’ Requirements
2.3.2. Mission Data Products and Performance Requirements
2.4. Science User Requirements
2.4.1. Space Climate Observatory and Model Validation
2.4.2. Total Solar Irradiance (TSI)
2.4.3. Solar Spectral Irradiance (SSI)
2.4.4. Radiometric/Parameter Requirements: Climate Benchmark
- Nadir Earth-viewing pointing requirement for climate applications is only ~1deg.
- Solar observations need a pointing accuracy of <0.1deg, maintained over one minute, to provide the TSI, allowing for the CSAR time constant with the proviso that the FoV is entirely within the solar disc, achieved with a simple quadrant detector on the instrument front-plate, as flown in heritage Physikalisch-Meteorologisches Observatorium Davos (PMOD) missions.
2.4.5. Climate Change Services
2.4.6. Reference Calibration of Sensors—Test-Site Characterisation
2.4.7. Calibration of sensors—SNO at PICS
2.4.8. TRUTHS specifications resulting from reference calibration using test-sites
2.4.9. Calibration of Sensors—Global SNOs
2.4.10. Calibration of Ocean Colour Sensors
2.4.11. Calibration for Greenhouse Gas Source and Sink Monitoring
2.4.12. Lunar Calibration
2.4.13. Calibration to Support Atmospheric Correction
2.4.14. Vegetation Indices
3. Mission Architecture
3.1. System Requirements
- (a)
- The payload instrument: A hyperspectral imaging spectrometer (HIS), which can be used to measure the Earth, Sun, and Moon.
- (b)
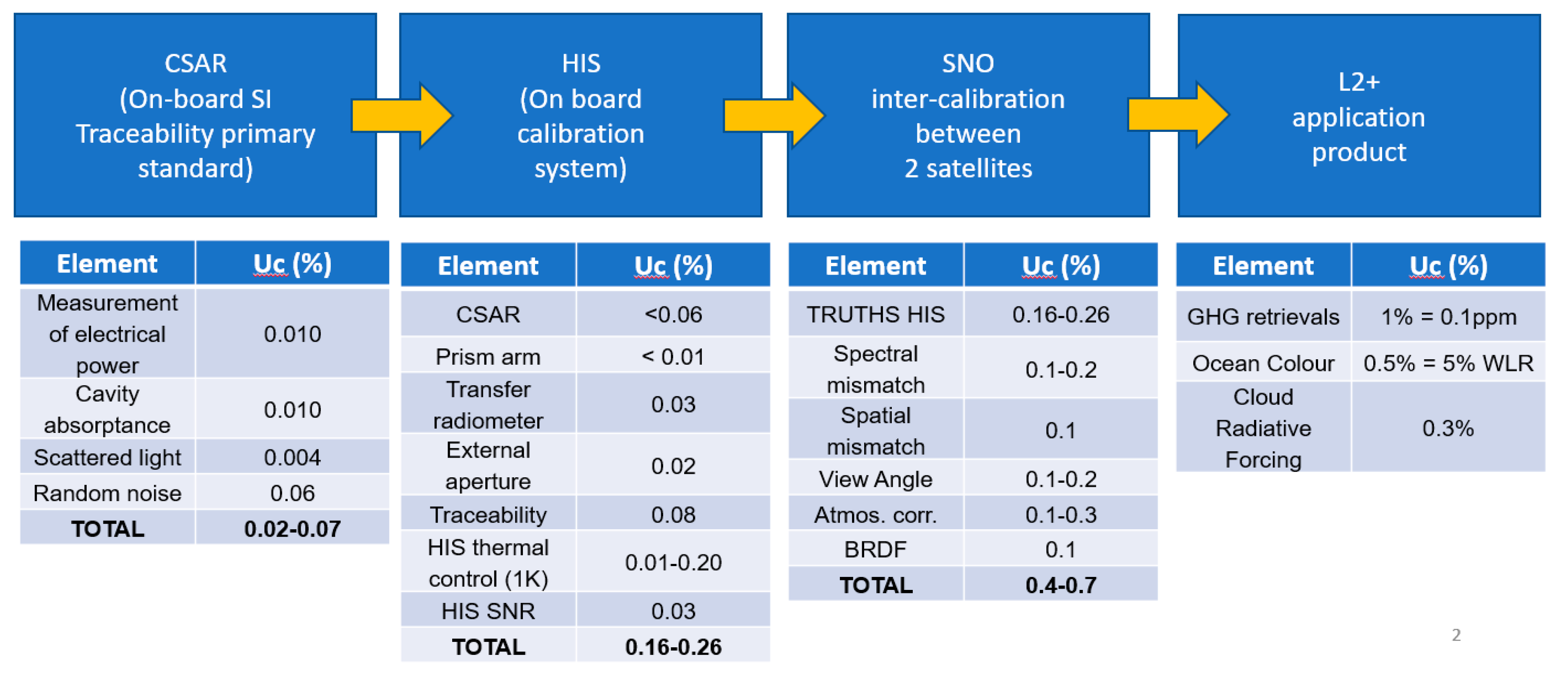
- The radiometric calibration of that HIS directly, regularly, and traceably to an on-board SI primary standard.
- (c)
- The choice of an orbit that supports climate benchmark measurements and increases the number of simultaneous cross-calibrations.
- (d)
- The use of a small, agile platform.
3.2. Payload
3.2.1. Overview
3.2.2. Hyperspectral Imaging Spectrometer (HIS)
3.2.3. Cryogenic Solar Absolute Radiometer (CSAR)
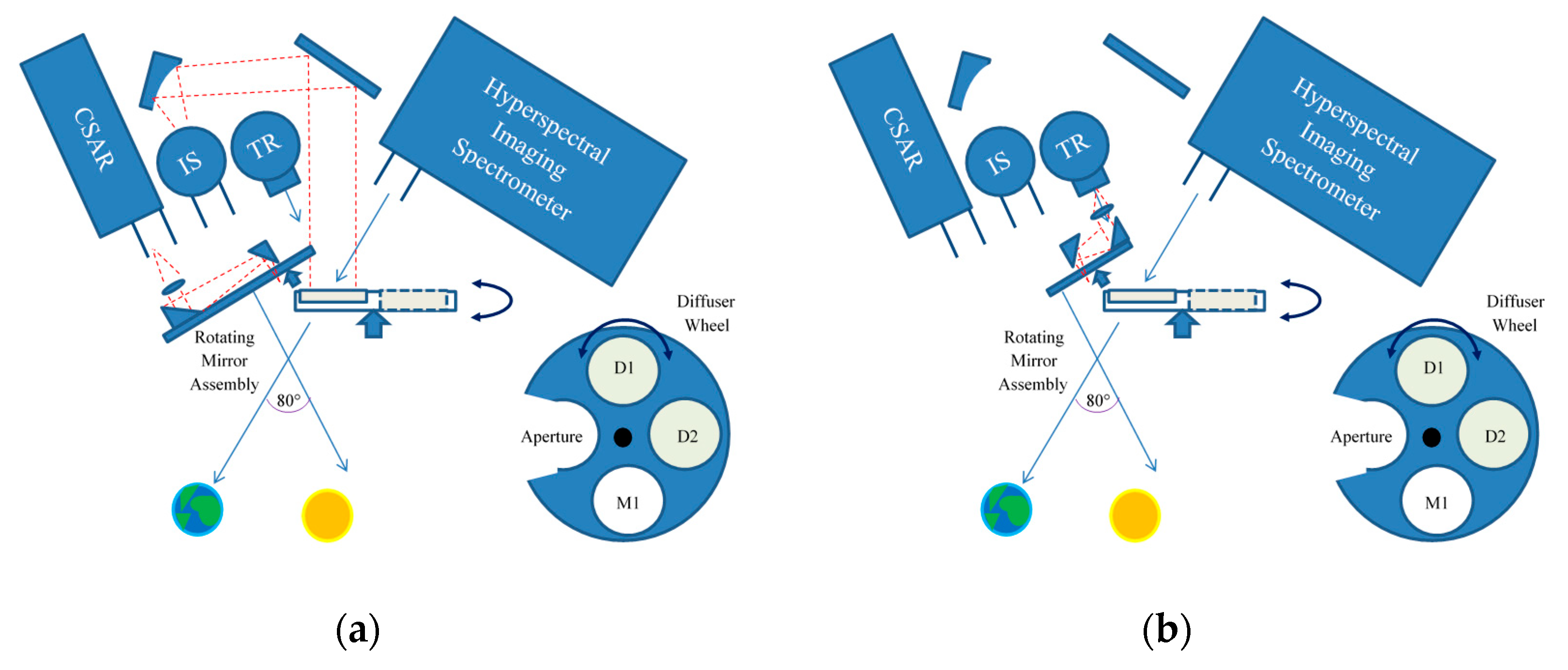
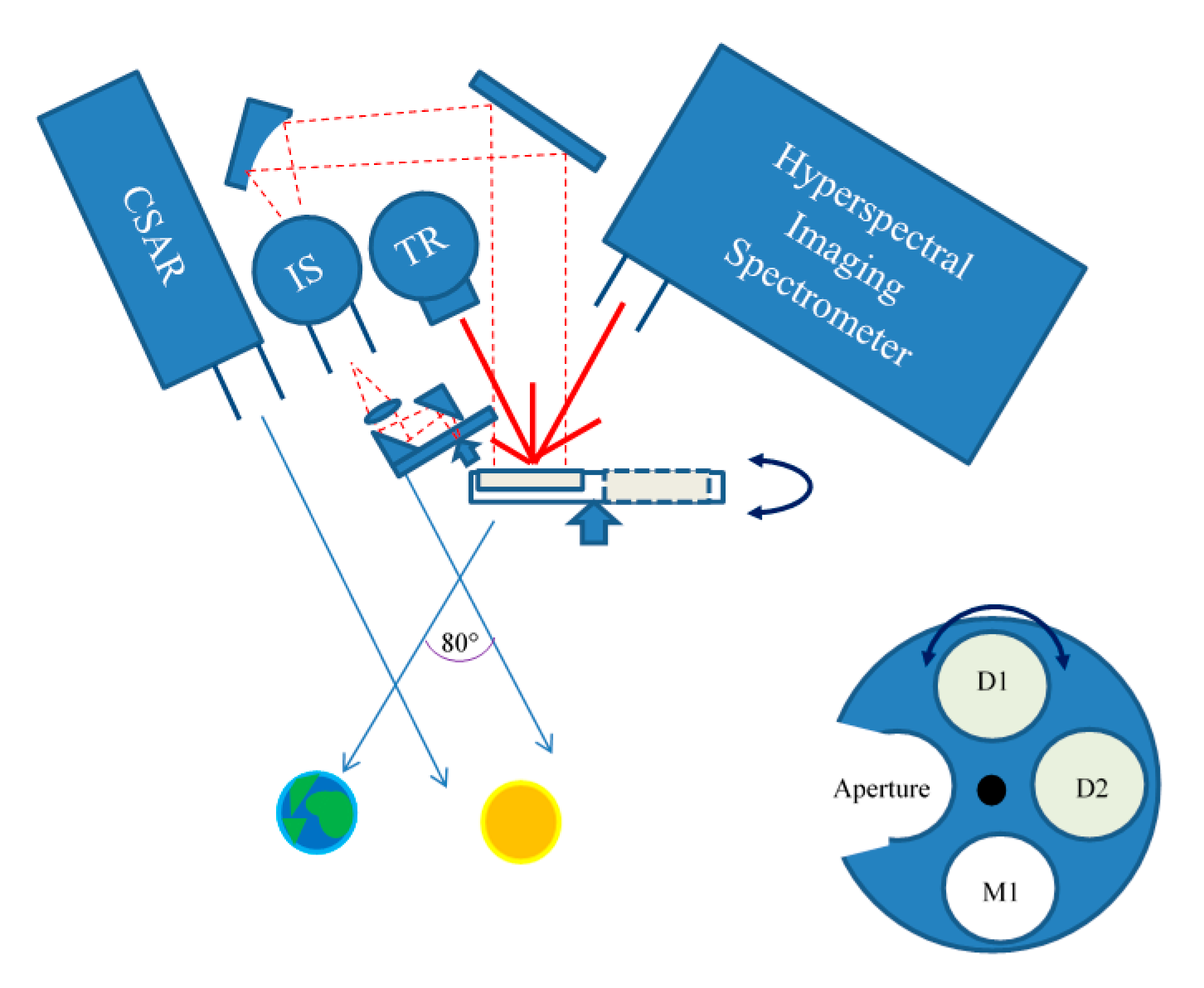
3.2.4. On-Board Calibration System (OBCS) Overview
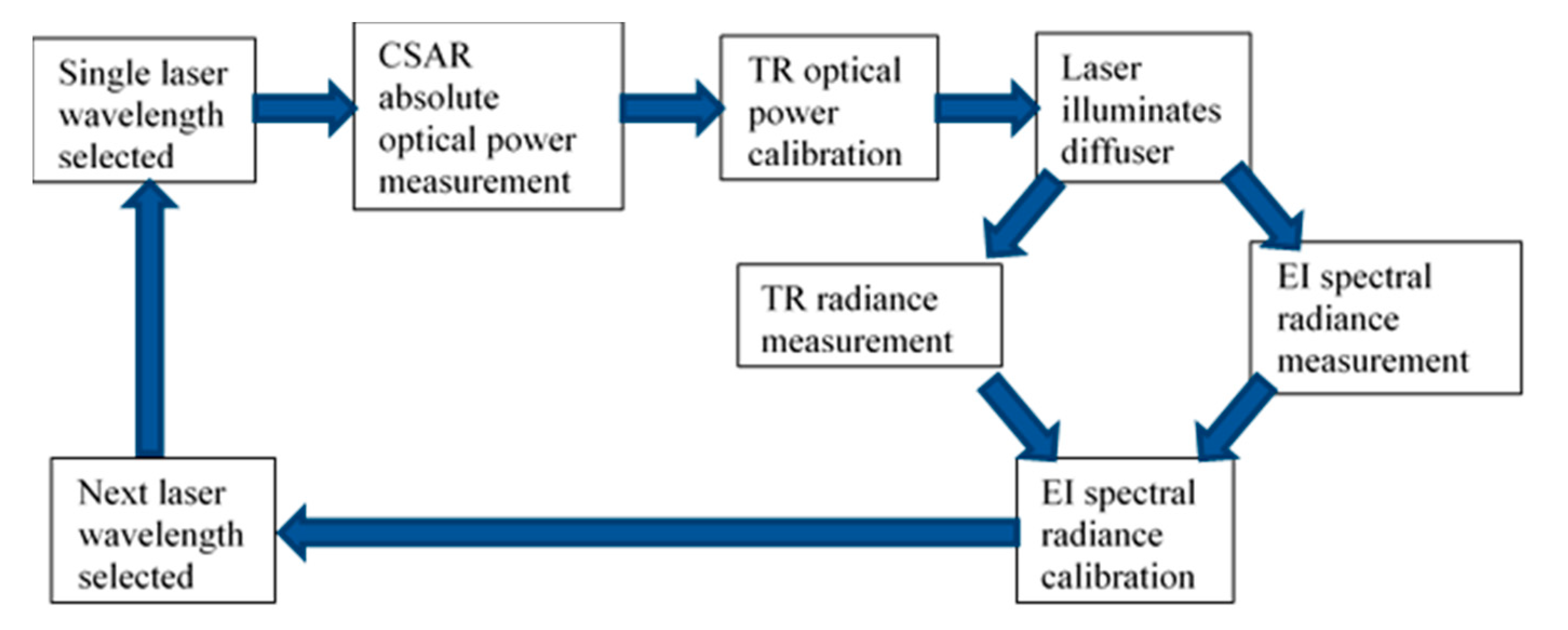
3.2.5. On-Board Calibration Procedure
3.2.6. Payload Performance
3.3. Satellite Bus and Launch
3.4. Operational Modes
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- IPCC. Climate Change 2013: The Physical Science Basis. Contribution of Working Group I to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; IPCC: Cambridge, UK, 2013. [Google Scholar]
- NRC. Earth Science and Applications from Space: National Imperatives for the Next Decade and Beyond; National Academy Press: Washington, DC, USA, 2007. [Google Scholar]
- Wielicki, B.A.; Young, D.F.; Mlynczak, M.G.; Thome, K.J.; Leroy, S.; Corliss, J.; Anderson, J.G.; Ao, C.O.; Bantges, R.; Best, F.; et al. Achieving Climate Change Absolute Accuracy in Orbit. BAMS 2013. [Google Scholar] [CrossRef] [Green Version]
- Essential Climate Variables. Available online: https://gcos.wmo.int/en/essential-climate-variables (accessed on 26 June 2020).
- Huang, Y.; Leroy, S.; Gero, J.; Dykema, J.; Anderson, J. Separation of longwave climate feedbacks from spectral observations. J. Geophys. Res. 2010, 115. [Google Scholar] [CrossRef] [Green Version]
- Muscheler, R.; Joos, F.; Beer, J.; Müller, S.A.; Vonmoos, M.; Snowball, I. Solar activity during the last 1000 yr inferred from radionuclide records. Quat. Sci. Rev. 2007, 26, 82–97. [Google Scholar] [CrossRef]
- Vonmoos, M.; Beer, J.; Muscheler, R. Large variations in Holocene solar activity: Constraints from Be-10 in the Greenland Ice Core Project ice core. J. Geophys. Res. Space Phys. 2006, 111, A10. [Google Scholar] [CrossRef] [Green Version]
- Schatten, K.H.; Orosz, J.A. Solar-Constant Secular Changes. Sol. Phys. 1990, 125, 179–184. [Google Scholar] [CrossRef]
- TSI composite. Available online: http://www.pmodwrc.ch/pmod.php?topic=tsi/composite/SolarConstant (accessed on 26 June 2020).
- Ineson, S.; Maycock, A.C.; Gray, L.J.; Scaife, A.A.; Dunstone, N.J.; Harder, J.W.; Knight, J.R.; Lockwood, M.; Manners, J.C.; Wood, R.A. Regional climate impacts of a possible future grand solar minimum. Nat. Commun. 2015, 6, 7535. [Google Scholar] [CrossRef]
- Menang, K.P.; Coleman, M.D.; Gardiner, T.D.; Ptashnik, I.V.; Shine, K.P. A high-resolution near-infrared extraterrestrial solar spectrum derived from ground-based Fourier transform spectrometer measurements. J. Geophys. Res. Atmos. 2013, 118, 5319–5331. [Google Scholar] [CrossRef] [Green Version]
- CLARREO Science Team Report. Available online: https://clarreo.larc.nasa.gov/pdf/CLARREO_Science_Team_Report_final.pdf (accessed on 26 June 2020).
- Haigh, J.D. The effects of solar variability on the Earth’s climate. Philos. Trans. R. Soc. Lond. A Math. Phys. Eng. Sci. 2003, 361, 95–111. [Google Scholar] [CrossRef]
- Feldman, D.R.; Algieri, C.A.; Collins, W.; Roberts, Y.; Pilewskie, P. Simulation studies for the detection of changes in broadband albedo and shortwave nadir reflectance spectra under a climate change scenario. J. Geophys. Res. 2011. [Google Scholar] [CrossRef] [Green Version]
- Feldman, D.R.; Collins, W.D.; Paige, J.L. Pan-spectral observing system simulation experiments of shortwave reflectance and long-wave radiance for climate model evaluation. Geosci. Model. Dev. 2015, 8, 1943–1954. [Google Scholar] [CrossRef] [Green Version]
- Wielicki, B.A.; Parker, L. On the Determination of Cloud Cover from Satellite Sensors: The Effect of Sensor Spatial Resolution. J. Geophys. Res. 1992, 97, 12–799. [Google Scholar] [CrossRef]
- European Commission. A European Research and Innovation Roadmap for Climate Services; European Commission: Brussels, Belgium, 2015. [Google Scholar]
- Cooke, R.; Wielicki, B.; Young, D.B.; Mlynczak, M.G. Value of information for climate observing systems. Environ. Syst. Decis. 2014, 34, 98–109. [Google Scholar] [CrossRef] [Green Version]
- Radiometric Calibration Network Portal. Available online: http://www.radcalnet.org (accessed on 26 June 2020).
- Bouvet, M.; Thome, K.; Berthelot, B.; Bialek, A.; Czapla-Myers, J.; Fox, N.P.; Goryl, P.; Henry, P.; Ma, L.; Marcq, S.; et al. RadCalNet: A Radiometric Calibration Network for Earth Observing Imagers Operating in the Visible to Shortwave Infrared Spectral Range. Remote Sens. 2019, 11, 2401. [Google Scholar] [CrossRef] [Green Version]
- Chander, G.; Hewison, T.; Fox, N.; Wu, X. Overview of Intercalibration of Satellite Instruments. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1056–1080. [Google Scholar] [CrossRef]
- Boussole: Buoy for the Acquisition of Long-Term Optical Time Series. Available online: http://www.obs-vlfr.fr/Boussole/html/cruises/monthly.php (accessed on 26 June 2020).
- Stone, T.C.; Kieffer, H.H. Assessment of Uncertainty in ROLO Lunar Irradiance for On-orbit Calibration. Proc. SPIE 2004, 5542, 300–310. [Google Scholar]
- Chander, G.; Helder, D.L.; Aaron, D.; Mishra, N.; Shrestha, A.K. Assessment of Spectral, Misregistration, and Spatial Uncertainties Inherent in the Cross-Calibration Study. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1282–1296. [Google Scholar] [CrossRef]
- Gorroño, J.; Banks, A.C.; Fox, N.P.; Underwood, C. Radiometric inter-sensor cross-calibration uncertainty using a traceable high accuracy reference hyperspectral imager. ISPRS J. Photogramm. Remote Sens. 2017, 130, 393–417. [Google Scholar] [CrossRef] [Green Version]
- Global Climate Observing System: Systematic Observation Requirements for Satellite-Based Data Products for Climate: 2011 Update; GCOS-154; WMO: Geneva, Switzerland, 2011; p. 128.
- Zibordi, G.; Melin, F.; Voss, K.; Johnson, B.C.; Franz, B.; Kwiatkowska, E.; Huot, J.P.; Wang, M.; Antoine, D. System vicarious calibration for ocean color climate change applications: Requirements for in situ data. Remote Sens. Environ. 2015, 159, 361–369. [Google Scholar] [CrossRef]
- Lunar Calibration: ROLO Robotic lunar Observatory. Available online: https://astrogeology.usgs.gov/moon-cal/ (accessed on 26 July 2020).
- Fox, N.; Aiken, J.; Barnett, J.J.; Briottet, X.; Carvell, R.; Frohlich, C.; Groom, S.B.; Hagolle, O.; Haigh, J.D.; Kieffer, H.H.; et al. Traceable Radiometry Underpinning Terrestrial- and Helio- studies (TRUTHS). Adv. Space Res. 2003, 32, 2253–2261. [Google Scholar] [CrossRef]
- Fox, N.; Kaiser-Weiss, A.; Schmutz, W.; Thome, K.; Young, D.; Wielicki, B.; Winkler, R.; Woolliams, E. Accurate radiometry from space: An essential tool for climate studies. Phil. Trans. R. Soc. A 2011, 369, 4028–4063. [Google Scholar] [CrossRef] [Green Version]
- Mise en Pratique for the Definition of the Candela and Associated Derived Units for Photometric and Radiometric Quantities in the SI. Available online: https://www.bipm.org/utils/en/pdf/si-mep/SI-App2-candela.pdf (accessed on 26 June 2020).
- Fox, N.P.; Haycocks, P.R.; Martin, J.E.; Ul-Haq, I. A mechanically cooled portable cryogenic radiometer. Metrologia 1995, 32, 581–584. [Google Scholar] [CrossRef]
- Gentile, T.R.; Houston, J.M.; Hardis, J.E.; Cromer, C.L.; Parr, A.C. National Institute of Standards and Technology high-accuracy cryogenic radiometer. Appl. Opt. 1996, 35, 1056–1068. [Google Scholar] [CrossRef] [PubMed]
- Goebel, R.; Stock, M.; Köhler, R. Report on the International Comparison of Cryogenic Radiometers; BIPM Report. BIPM. Available online: https://www.bipm.org/utils/common/pdf/rapportBIPM/RapportBIPM-2000-09.pdf (accessed on 26 July 2020).
- Ångström, K. Eine electrische Kompensationsmethode zur quantitativen Bestimmung strahlender Wärme. Nova Acta Soc. Sci. Upsal. Ser. 1893, 3, 16. [Google Scholar]
- Kurlbaum, F. Notiz über eine Methode zur quantitativen Bestimmung strahlender Wärme. Ann. Phys. (Leipzig) 1894, 287, 591. [Google Scholar] [CrossRef] [Green Version]
- Quinn, T.J.; Martin, J.E. A radiometric determination of the Stefan-Boltzmann constant and thermodynamic temperatures between -40 °C and +100 °C. Philos. Trans. R. Soc. 1985, 316, 85–189. [Google Scholar]
- Martin, J.E.; Fox, N.P.; Key, P.J. A cryogenic radiometer for absolute radiometric measurements. Metrologia 1985, 21, 147–155. [Google Scholar] [CrossRef]
- TRUTHS, Traceable Radiometry Underpinning Terrestrial- and Helio- Studies. Available online: https://youtu.be/-_BznE1Ckgc (accessed on 26 June 2020).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Accuracy | Stability (Decade) |
|---|---|---|
| Total Solar Irradiance (TSI) | 0.04% | 0.01% |
| Solar Spectral Irradiance (SSI) | 0.3% (200–2400 nm) | 1% |
| Reflected solar radiance (integrated) | 1 W/m2 = ~1% | 0.3 W/m2 = ~0.3% |
| Level 1 Products | Mission Requirement | |||||||
|---|---|---|---|---|---|---|---|---|
| Spectral Range (nm) | Bandwidth (nm) (Spectral Sampling X0.5) | Uncertainty (%) (k = 2) | SNR (with Respect to Earth Albedo of 0.3) | GIFOV (m) | ||||
| Earth Spectral Radiance (Climate) | 320–2400 | 8–25 nm | Goal | Threshold | >50 | 250 | ||
| 0.3 | <1.0 | |||||||
| Solar Spectral Irradiance | <320–2400 | <1 (<400), <5 (<1000), <10 (<2400) | 0.3 | <1.0 | >300 | NA | ||
| Total Solar Irradiance | Total | 200–30000 | <0.02 | <0.05 | >500 | NA | ||
| Goal | Threshold | Goal | Threshold | |||||
| Earth Spectral Radiance (Cal/Val/other) | <380–2400 | <8 (< 1000 nm) <16 (>1000 nm) | 0.3 | <1.0 | >300 | >80 (<500 nm) >150 (500–1000 nm) >100 (>100 nm) | <50 | 100 (>500 nm) 250 (<500 nm) |
| Lunar Spectral Irradiance | <350–2400 | <8 (< 1000 nm) <16 (>1000 nm) | 0.3 | <2.0 | >~300 | NA | ||
| Mission Requirement | Parameter: Proposed Value | Driving Mission Objective | Required | Desired |
|---|---|---|---|---|
| SI traceable measurement of the solar reflected spectrum | Spectral range: 320 nm–2400 nm | Nadir Reflectance Spectral Climate Change Benchmarks | <350 nm–2300 nm | |
| Earth Radiation budget | From 320 nm to 2400 nm | |||
| Plant optical traits and minerals | 380 nm–2400 nm | Up to 2500 nm | ||
| Accuracy: 0.3% (k = 2) | Trend estimation of cloud feedback | 0.3% (k = 2) | ||
| Spectral resolution: 1 nm–10 nm | Nadir Reflectance Spectral Climate Change Benchmarks | 1 nm–10 nm | ||
| 50 m (land) 250 m (ocean) | Cloud masking | <250 m | <150 m | |
| SI traceable measurement of total solar irradiance | Spectral range: 0.2–>30 μm | Solar variability and Earth Radiation Budget | 0.2–>30 μm | |
| Accuracy: 0.02% (k = 2) | Solar variability and Earth Radiation Budget | <0.02% (k = 2) | ||
| SI traceable measurement of solar spectral irradiance | Total Spectral range: 320 nm–2400 nm | Solar variability and ozone | <350 nm–2400 nm | 200 nm–2400 nm |
| Accuracy: 0.3% (k = 2) | Solar variability | 0.3% (k = 2) | ||
| Reference calibrations | As for radiance above | Reference Intercalibration: particularly for ocean colour monitoring sensors | <400 nm–>1000 nm | 200 nm–2400 nm |
| Scene Type | Percent Error due to Limitation of Spectral Range | |||
|---|---|---|---|---|
| 32–2300 nm | 320–2400 nm | 310–2300 nm | 310–2400 nm | |
| Global | 0.09% | 0.07% | 0.05% | 0.03% |
| All-sky Ocean | 0.10% | 0.08% | 0.04% | 0.03% |
| All-sky Land | 0.08% | 0.06% | 0.05% | 0.04% |
| Clear Ocean | 0.16% | 0.15% | 0.05% | 0.04% |
| Clear Desert | 0.10% | 0.07% | 0.07% | 0.04% |
| Climate Variable | Role | TRUTHS Providing Direct Observation | TRUTHS Providing Reference Calibration |
|---|---|---|---|
| Solar Irradiance | Climate forcing | yes | yes |
| Earth Radiation Budget | Climate forcing, feedback | yes | yes |
| Surface Albedo | Albedo feedback | yes | yes |
| Cloud Cover | Cloud feedback | yes | yes |
| Cloud Particle Size Distribution | yes, through spectral benchmarking | yes | |
| Cloud Effective Particle Size | yes | ||
| Cloud Ice/Water Content | yes | ||
| Cloud Optical Thickness | yes | ||
| Water Vapour | Column water vapour response | yes | yes |
| Ozone | Stratospheric ozone feedback | no (limited spectral resolution) | yes |
| Aerosols Optical Depth | Climate forcing Atmospheric correction | (limited temporal/spatial coverage) yes | yes yes |
| Ocean & Lake Colour | Carbon cycle | yes | yes |
| Ice and Snow Cover | Albedo feedback | yes | yes |
| Vegetation Indices | Carbon Cycle and Albedo feedback | yes | yes |
| Land Cover/Land Use | Surface Radiative Forcing | yes | yes |
| GHGs | CO2/CH4 emissions monitoring | Yes but only large scale emitters | Yes |
| Source of Uncertainty | Resultant Uncertainty on Sentinel-2 TOA Reflectance % (k = 1) | Comments | |||
|---|---|---|---|---|---|
| Single Overpass | Mean of Multiple Overpasses | ||||
| Best S2 Band | Worst S2 Band | Best S2 Band | Worst S2 Band | ||
| Spectral Resolution/Accuracy of TRUTHS | <0.1 * | 0.1–0.6 * | <0.1 * | 0.1–0.6 * | For all sites and interpolations studied. Worst cases are B1, B5 and B6 but large variability depending on site, interpolation and spectral binning pattern. |
| Spectral Knowledge of TRUTHS | <0.1 * | ~0.2 * | <0.1 * | ~0.2 * | For a 0.2 nm k = 1 central wavelength and bandwidth knowledge. Worst S2 bands are B6 and B1 |
| Non-Spatial Co-Alignment of TRUTHS with Sensor under Test (site A) | 0.12 | 0.5 | <0.1 | <0.1 | For a single overpass over La Crau site with a positioning knowledge of 32 × 44 m2. Best band is B1 and worst one is B12. |
| Non-Spatial Co-Alignment of TRUTHS with Sensor under Test (site B) | <0.1 * | <0.1 * | <0.1 * | <0.1 * | For a single overpass over Libya-4 site with a positioning knowledge of 50 × 50 m2 |
| Error due to 30-min Difference in Overpass Times: Solar/View Angle: Atmosphere | <0.1 * | ~0.2 * | <0.1 * | <0.2 * | Result of Aerosol path difference between 6SV1 and MODTRAN v5 calculated for mean of annual Aerosol optical thickness. Worst case is B1. |
| Error due to 30-min Difference in overpass Times: Solar/View Angle: Atmosphere (Some Knowledge) | <0.1 * | <0.1 * | <<0.1 * | <<0.1 * | Assume mean of annual atmospheric variations for Libya 4 test site: Requires knowledge of atmosphere around time of overpass. Can be reduced further by correction of time difference |
| Error due to 30-min Difference in overpass Time for Full Range of Potential Annual Atmospheric Properties (No Knowledge Upper Limit) | 0.3 | 2 | <<0.1 * | <<0.1 * | Equivalent to no knowledge of atmosphere parameters but can be reduced by knowledge of time difference. Worst case in the SWIR bands |
| Error due to Lack of Knowledge of Surface BRF for 30-min Difference in Overpass Time | 0.2–0.4 * | 0.2–0.4 * | <0.1 * | <0.1 * | Model would improve with experimental data from TRUTHS and also with multiple measurements effect would tend to zero. Impact at TOA is assumed half for B1. |
| Total Achievable Uncertainty due to Cross-Comparison Process for Anticipated Level of Knowledge & Conditions | 0.4–0.5 | 0.4–0.7 | 0.2 | 0.3–0.7 | Reduction in uncertainty due to multiple overpasses would include multiple sites and does not take account of correlations (uncertainty sources included in total are marked with an asterisk) |
| Mission Requirement | Parameter |
|---|---|
| Spectral coverage (Earth and Sun) (spectrometer) | 320–2400 nm (potential relaxation of spectral range if technology drivers are too great but would limit value at shorter band for solar applications) with continuous coverage. |
| Radiometric Accuracy (spectrometer) | Spectrally integrated reflectance product - 0.3% (k = 2) on the reflectance of 0.3 |
| Radiometric Accuracy | Spectrally resolved reflectance product - 0.3% for the key spectral regions, extending to 0.5–1.0% in less sensitive or energetically low-contributing spectral positions. |
| Radiometric Accuracy (total combined uncertainty) | Spectrally integrated (0.32 to 2.4 μm) Earth reflected solar radiance product 0.3% (k = 2) |
| Radiometric Accuracy | Spectrally resolved (0.32 to 2.4 μm) solar irradiance 0.3% (k = 2) |
| Radiometric Accuracy (TSI) | 0.2 μm to 30 um integrated total irradiance 0.02% accuracy (k = 2) |
| Spectral Resolved Spectral Range | 320 to 2400 nm continuous |
| Spectral Resolution | For reference calibration need to match customer sensor: 8 nm bandwidth ~4 nm steps) Can be relaxed to 25 nm for some non-critical wavelength regions. |
| Signal to Noise Ratio | Adequate to meet accuracy levels in products with appropriate averaging. Reference calibration and level 2 retrievals require >100 and ideally > 300 for at least visible spectral region at highest resolution |
| Instantaneous Spatial Resolution (IFOV) | < 250 m. ideally 30–50 m |
| Polarisation Sensitivity | 0.5% (k = 2) for λ<1000 nm 0.75% (k = 2) for λ>1000 nm (Although for many applications these can be relaxed. They are primarily to support off-axis reference calibrations of other sensors and associated atmospheric corrections). |
| Orbit | polar 90-degree inclination with altitude of 609 km (±200 m) |
| Reference inter comparison samples (large FOV climate focused sensors) | 2000 samples (assuming SNR <50 will reduce with improved SNR) within 1deg and ±5 min. (this assumes non selected targets for calibration). For higher GIFOV sensors and higher SNR using SNO this value can reduce significantly to <10 |
| Continuity of operation | Sufficiently continuous to not increase the sampling bias error contribution to represent a significant uncertainty contribution. |
| Revisit | As frequent as possible but <61-day revisit as determined by the 90 deg polar orbit. |
| Coverage | Global nadir spectral radiances |
| Sampling time | Continuous during sunlit phase of the Earth |
| Swath | 50 to 100 km minimum |
| Quantisation | 14 bit |
| Pointing Accuracy | <1 km |
| Pointing Knowledge | <3 x GIFOV (<150 m) Goal of 50 m. |
| Parameter | Value | Comment |
| Spectral bands | 320 nm–400 nm 400 nm–2450 nm | Assumes use of a wide spectral band HgCdTe detector and a separate Si detector through a common telescope with a prism based spectrometer |
| Swath | 100 km | Corresponding GIFOV will depend on choice of detector (number of pixels) 2000 and 3000 options are now readily available |
| Spatial Resolution | 50–100 m GIFOV | Depends on detector and SNR |
| Spectral Sampling | 4 nm < 1000 nm 8 nm > 1000 nm | UV native spectral resolution ~1 nm, with bandwidth typically 2X this value |
| SNR | >150 | Climate benchmarking only require ~50 due to zonal averaging but higher values required for cross-calibration and secondary applications |
| Detector Technology | UV: Si CMOS VIS-SWIR: MCT | Teledyne e2v CIS115/CIS120 (250K) Teledyne e2v CHROMA-D 1/2/3k x 512 (135K) |
| Imager Configuration | Refractive (prism) | |
| Telescope | 1 telecentric 5 Al mirror telescope | One common entrance pupil for calibration. |
| Entrance Pupil | 45 mm diameter | |
| Dwell Period (@50 m GIFOV) | 7.25 ms | |
| Polarisation Control | Polarisation scrambler | With telescope mirror configuration compensation. |
| Spectral Image Slit | At spectrometer focal plane | Potentially dual slit (one for each detector) (UV can be larger GIFOV and co-registration not as critical) |
| Uncertainty Source | Lab-Based Uncertainty | Breadboard-Based Uncertainty | Space-Based Uncertainty | Notes |
|---|---|---|---|---|
| Laser (diodes) Radiometric Stability (60 s) | 0.01% | 0.07–0.3% | <0.07% | Space qualified, stabilized DFB lasers. Note for the breadboard testing not all lasers were of DFB quality resulting in poor stability |
| CSAR/Primary Std | 0.02% | 0.06% | <0.06% | Worst-case scenario for laser diode power levels |
| Prism Arm | <0.01% | <0.01% | <0.01% | Negligible |
| Transfer Radiometer | 0.02% | 0.03% | <0.03% | Voltage measurement uncertainty |
| External Aperture | 0.02% | 0.02% | 0.02% | Calibrated pre-flight |
| Traceability | 0.01% | 0.08% | <0.08% | Worst-case scenario and largely due to potential residucal non-uniformity effects |
| HIS Thermal Control (1K) | 0.01–0.20% | <0.05% at all wavelengths, except at extremes (<350 nm & >2200 nm) | ||
| HIS SNR | 0.03% | Required laser source integration times from 7–60 sec, and some spatial binning for solar spectral irradiance | ||
| TOTAL | 0.04% | 0.16–0.32% | 0.16–0.26% | Uncertainties added in quadrature |
| Operational Mode | View | Frequency | Length of Operation | Notes |
|---|---|---|---|---|
| Solar measurements | Solar | Every orbit | 5–10 min per orbit | Probably polar views |
| Calibration of the OBCS to CSAR | Internal satellite diffuser | Potentially every orbit. Frequency to be defined based on observed ageing | 30 min, one or two wavelengths per orbit | Carried out during Earth shadow side, builds a calibration of the TR so that it can be used with diffuser on a daily basis |
| Full Calibration of HIS Earth Shadow | Internal Satellite diffuser | Nominally achieved Bi-monthly (timed defined following in-orbit degradation monitoring). Can be carried out on as needs basis | 1 day accumulated (over several orbits) | Performed during shadow phase wavelength by wavelength |
| Calibration Monitoring of HIS | Laser/lamp illuminated diffuser | Daily using ongoing updates of OBCScoefficients | Few minutes | Generally Performed in shadow but can be carried out at any part of orbit |
| Climate Benchmarking | Earth (nadir view) | Bulk of operations—most of the orbit | ~35% duty cycle | |
| Cross–Calibration of Sensors Using Angular Movement | Earth—test-sites (non-nadir) | ~1- per day (but could be orbital) | ~ 5 min | Only when required |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fox, N.; Green, P. Traceable Radiometry Underpinning Terrestrial- and Helio-Studies (TRUTHS): An Element of a Space-Based Climate and Calibration Observatory. Remote Sens. 2020, 12, 2400. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12152400
Fox N, Green P. Traceable Radiometry Underpinning Terrestrial- and Helio-Studies (TRUTHS): An Element of a Space-Based Climate and Calibration Observatory. Remote Sensing. 2020; 12(15):2400. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12152400
Chicago/Turabian StyleFox, Nigel, and Paul Green. 2020. "Traceable Radiometry Underpinning Terrestrial- and Helio-Studies (TRUTHS): An Element of a Space-Based Climate and Calibration Observatory" Remote Sensing 12, no. 15: 2400. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12152400