2.1. OLCI Moon Observation Data
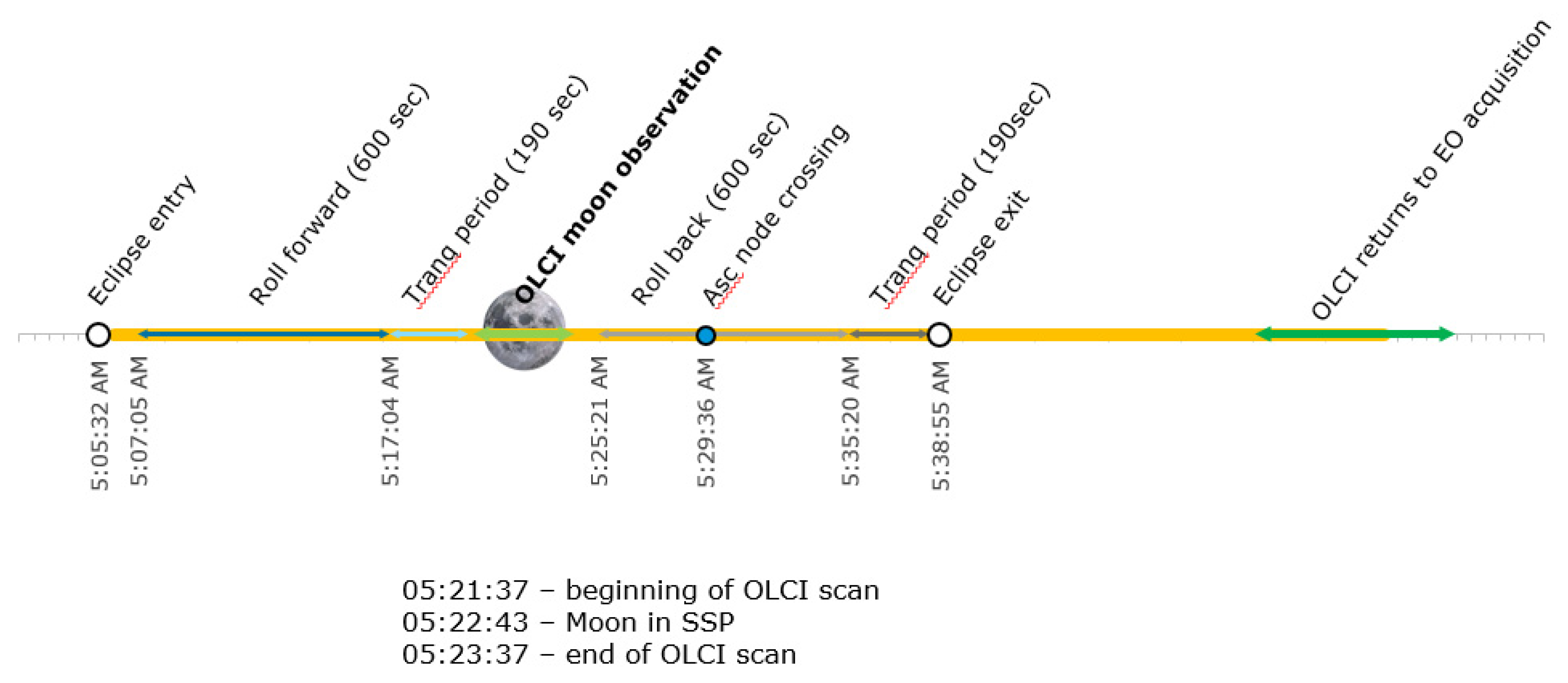
After the roll of the spacecraft was stabilized, the instrument was turned on in nominal Earth Observation mode. The instrument was collecting samples for 2 min with the moon coming into view roughly in the middle of this period with a phase angle of −6.45°. The timeline of the maneuver is presented in
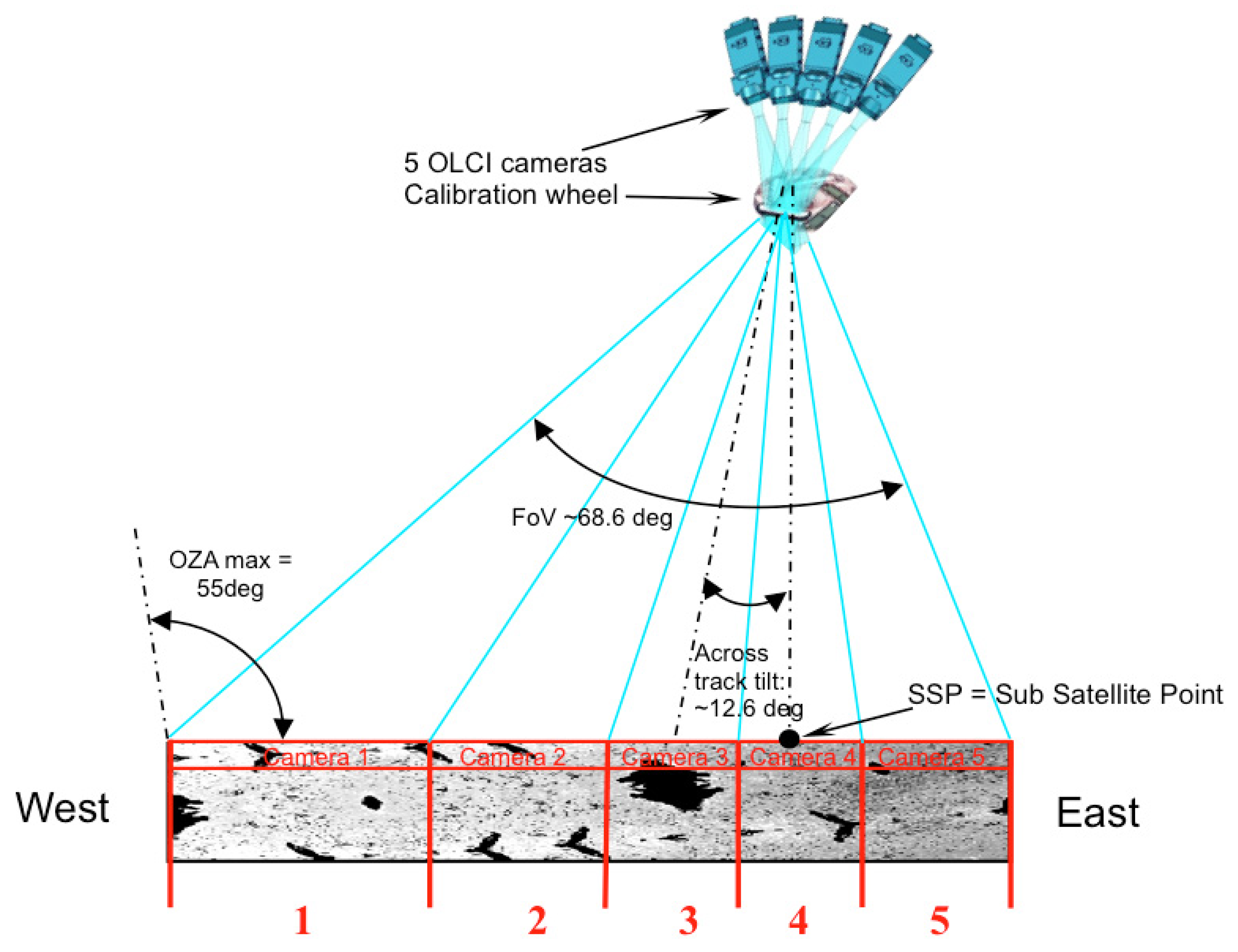
Figure 2. The calibration window was selected to make sure that the moon was as close to the middle of the swath as possible to avoid possible negative effects that may occur close to edges of the camera field of view (FOV). Additionally, one of the objectives was to capture all possible stray-light pixels.
Raw data (in Digital Numbers—DNs) acquired during the observation needs to be corrected and calibrated to physical values—undergo Level-1 processing. During processing, raw counts of the detector are converted to radiance as follows:
where:
subscripts stand for the spectral band, the spatial pixel, and the camera identifiers, respectively. When is used, it means that all items within the range are involved;
is the scene radiance as seen by the pixel
is the OLCI raw sample—in the equation, it is corrected for nonlinearity;
is a nonlinear function representing the nonlinearities within the video chain. It also depends on the VAM programmable gain ;
is the instrument radiometric gain expressed in counts per radiance unit. It is determined in flight through the periodic radiometric calibration (performed with solar diffuser);
is the stray-light radiance contribution. It may result from all the wavelengths the detector is sensitive to, from the whole camera FOV (across-track) as well as from out of the FOV (i.e., from FOV of other modules, but also from FOV along-track, i.e., from scenes that have been previously observed or that will be further observed, hence the subscript
is the smear contribution (light integration during Charge-Coupled Device (CCD) frame transfer);
is the dark signal of the pixel during the observation.
The radiometric model is described in technical guides available at [
16].
Since the radiometric model is valid regardless of the observed scene, this calibration approach holds for an OLCI moon observation. However, the processing chain was designed for Earth Observation without plans to perform moon observations routinely. Some steps of Level-1 processing are not applicable to data acquired from the moon scan. An obvious example of such a processing step is the georeferencing of samples. For that reason, a development platform of the Instrument Processing Facility (IPF-D) was used to process the moon data. It was configured to output partial Level-1 products, such as calibrated instrument radiances (before and after stray-light correction).
In the case of a wide field of view imaging spectrometer, such as the OLCI, in some observation scenarios (cloud-free ocean pixels close to clouds or land covered by vegetation), stray-light might significantly contribute to radiances. This issue is addressed with stray-light correction performed during Level-1 processing. The moon seen by Sentinel-3 instruments is (in visible bands) a bright circle on a nearly complete black background. This kind of sharp dark → bright → dark transition can be the perfect target to analyze stray-light [
17,
18,
19]. Moon observation has proven to be a great opportunity to assess stray-light correction on-orbit.
2.2. OLCI Stray-Light and Its Correction
According to the OLCI design, the two main contributors to stray-light are the two main optical components, the ground imager and the spectrometer. Stray-light occurring within the ground imager consists of a two-dimensional process, related to the two spatial dimensions, namely the along-track and the across-track directions. There is an important assumption of lack of exchange between wavelengths, as there is no identified process implying energy transfer in the spectral dimension of the incoming radiance field inside the ground imager (GI). Contribution from the spectrometer is also a two-dimensional process with only one spatial dimension—the entrance slit aligned with the across-track dimension, canceling the along-track one and the spectral one introduced by the light dispersion device, the grating. In contrast with the ground imager, the spectrometer stray-light also includes a contribution from the sensor—a CCD—within which scattering of photoelectrons occurs and becomes significant at wavelengths higher than 900 nm.
OLCI stray-light correction was designed based on preliminary characterization showing moderate levels of stray-light—a few percent of the total signal. Therefore, it is assumed that the fundamental structure of the signal is preserved (even if it is slightly blurred by the stray-light) both from a spatial and spectral point of view. This allows using a robust correction method based on a second degradation of the signal. It is assumed that the second degradation has roughly the same impact on the (already) degraded signal as the actual sensing had on the original signal. As the system response is known, it is possible to degrade a second time the measured signal and, by subtraction, to estimate the degradation itself and correct for it. This is equivalent to the well-known expansion:
Rewriting this for a stray-light degradation (linear) operator, the degraded version of the incoming signal x can be written as the sum of the original signal and the degradation itself:.
The second degradation applied to the result gives:
If the degradation operator can be considered as a perturbation (in the physics sense)—that is verifying: energy(
) << energy(
x)—it follows:
as
can be neglected and
x can be retrieved by:
This method is sometimes referred to as the “second degradation method”, described in detail in OLCI Level 1 Algorithm Theoretical Basis Document [
20].
2.2.1. The Moon, a Great Target for Investigation on SL Correction
The OLCI-B moon observation has been used to assess the performance of the stray-light correction.
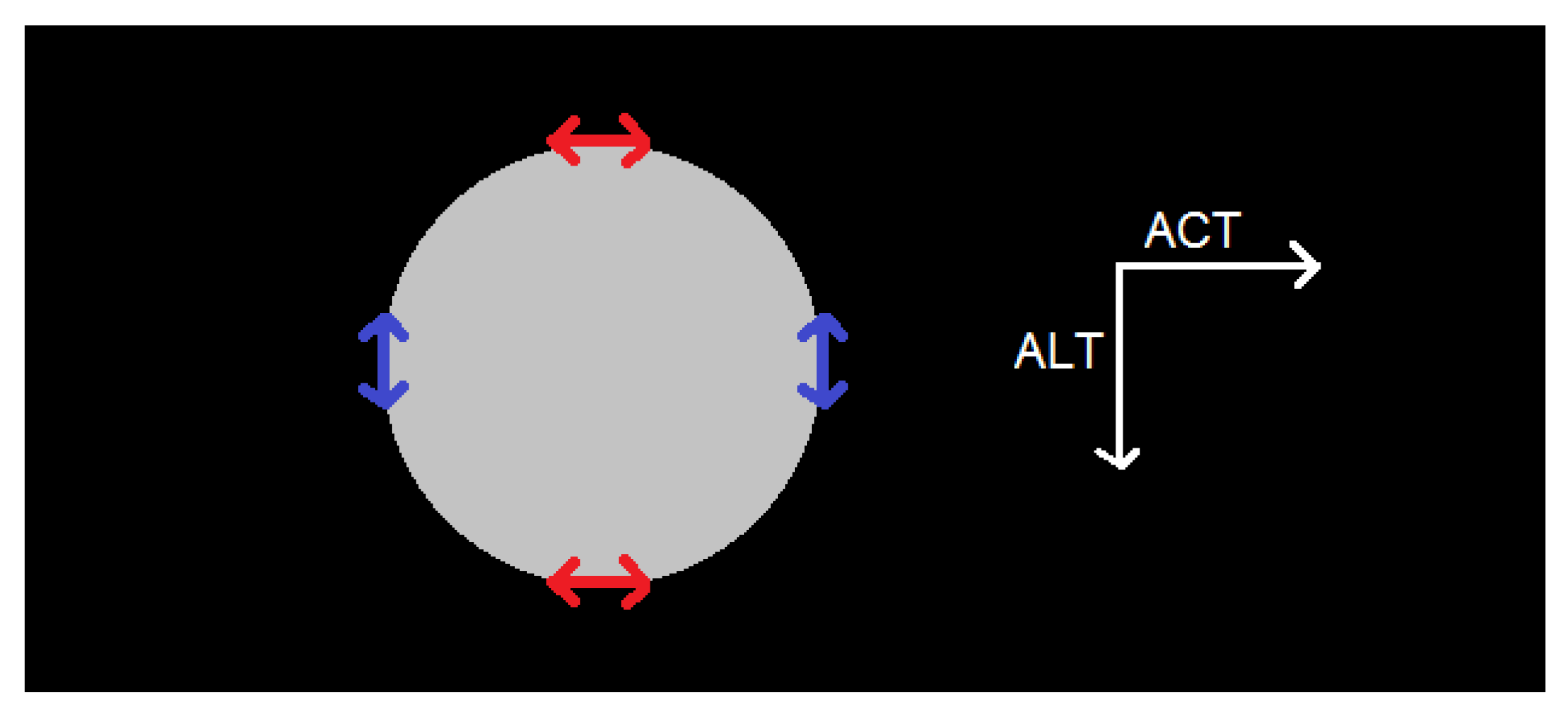
For several reasons, the moon is appropriate for stray-light analysis. First, there is in all spectral bands a sharp transition between bright and dark zones (respectively, moon and deep space), which is very important to analyze the impact of SL correction close to the bright/dark transitions. Second, the dark zone (deep space) is a homogeneous absolute reference at zero radiance, not perturbed by any geophysical signal. Third, the (near) full moon image allows selecting dark/bright interfaces aligned either with the ALT (along-track) direction or with the ACT (across-track) direction, as illustrated in
Figure 3. This is important to help to separate the impact of GI (ground imager) SL from the impact of SP (spectrometer) stray-light, since in the ALT direction, only GI stray-light is active. Neglecting the curvature of the moon over a few lines or a few columns allows averaging these lines or columns to reduce the noise. Finally, the stray-light correction performance in the ALT and ACT directions can be assessed on both sides of the moon disk (above and below, left and right), which is important since the stray-light kernels are not systematically symmetrical (especially some ghosts which are present only on one side).
These conditions, well adapted for stray-light analysis, are difficult to find on Earth observation scenes.
2.2.2. Potential SL Correction Improvements Tested on the Moon Data
The appropriateness of the moon scene for the stray-light investigations allowed us to test two potential improvements in the stray-light correction:
An iterative method, a solution to the ε2 limitation that appeared necessary for Near Infrared (NIR) bands
Additional spectrometer SL kernels at wavelengths above 1000 nm, improving correction of channel Oa21, for which photoelectrons scattering inside the CCD is currently underestimated.
Iterative Method
As mentioned in
Section 2.2, the stray-light correction relies on the “second degradation method”. This method is expected to work well when the stray-light is very small compared to the uncorrupted signal. In the NIR (typically spectral bands Oa19 to Oa21), the photoelectron scatter stray-light level becomes high, and the “second degradation method” results in a stray-light overcorrection.
In theory, this limitation of the “second degradation method” (also referred to as “ε2 limitation”) for high stray-light levels can be improved by an iterative approach. It consists after a first estimation of the stray-light corrected radiance in re-estimating the stray-light by applying the SL kernel on this SL-corrected radiance, providing a better stray-light estimation since it is obtained from an image that has less stray-light. This re-estimated stray-light is then removed from the original image. This process can be performed iteratively, each iteration delivering a better estimation of the stray-light that should converge toward the true stray-light.
Practically, this “iterative” method can be achieved with no-extra computational cost by using a simple re-formulation of the kernels in the Fourier transform domain.
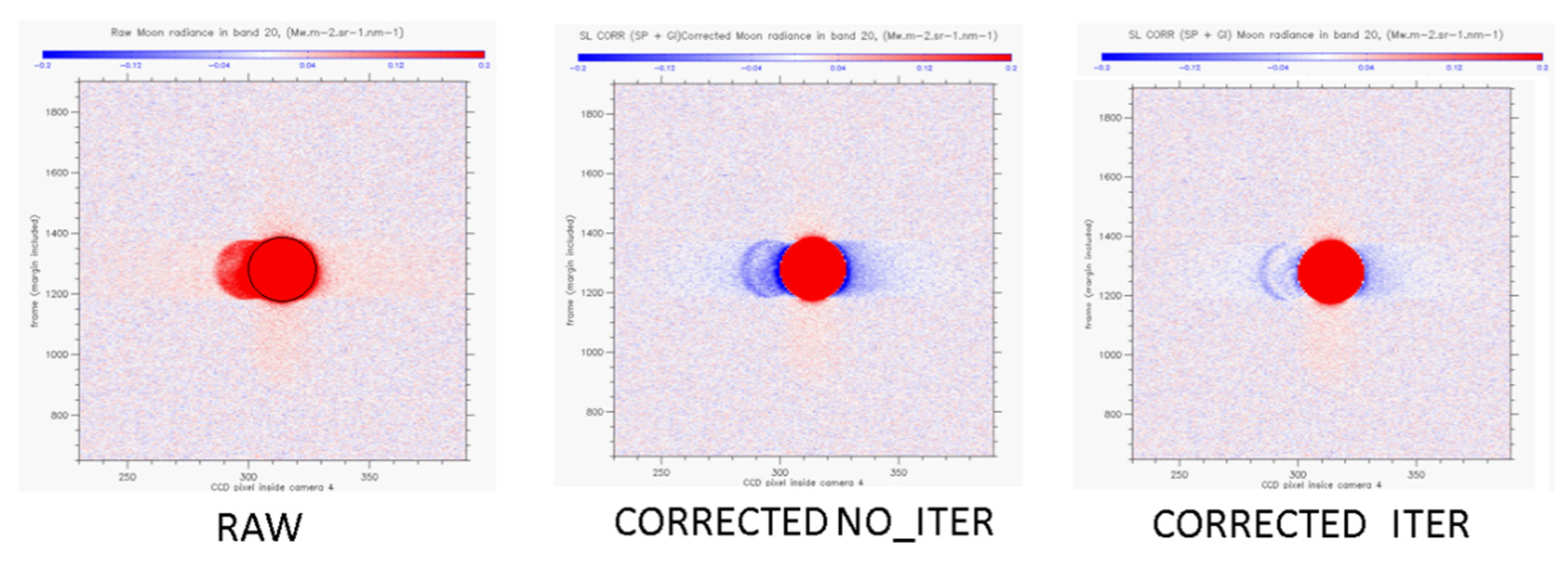
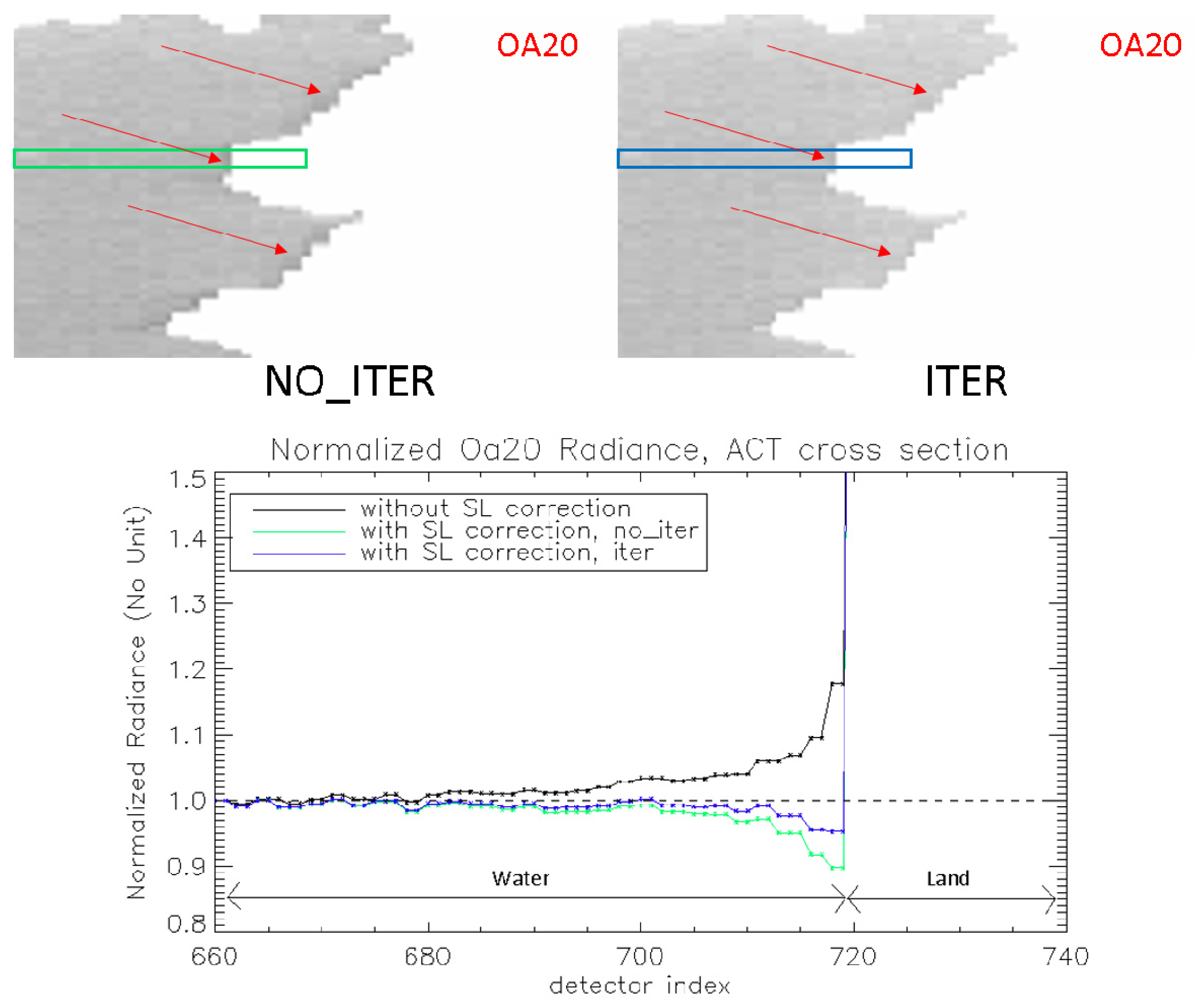
Tests on the moon data have shown, as expected, significant improvement in the NIR bands. This is illustrated for the band Oa20 (
Figure 4) in which the overcorrection due to the “second degradation method” has been significantly reduced, even though a slight overcorrection remains, which may be due to other problems than the
ε2 limitation, such as characterization problem or interpolation problem.
Usage of Additional Spectrometer Stray-Light Kernel Above 1000 nm
In the NIR domain, one strong contributor to the total stray-light is the scattering of the photoelectrons within the CCD (so-called “NIR scatter” stray-light). This scattering is not an electronic cross-talk but an optical diffusion in the silicon layer of CCD. Photons with longer wavelengths are weakly absorbed within CCD material and diffuse to neighboring pixels. The NIR scatter stray-light is completely negligible below ≈900 nm but strongly and gradually increases toward longer wavelengths, reaching a maximum around 1028 nm, followed by a slight decrease until 1040 nm, the upper limit of OLCI’s spectral range. The NIR scatter stray-light contribution is accounted for in the spectrometer stray-light kernels, together with the optical contributions (scatter and ghost).
The nominal SL correction uses spectrometer kernels characterized at five different wavelengths. The last one is located at 973 nm, while the center of band Oa21 is around 1020 nm. Thus, its stray-light correction fully relies on the kernel at 973 (there is no extrapolation beyond characterization wavelengths). Consequently, the NIR_SCATTER stay-light is strongly underestimated for channel Oa21, resulting in significant residual NIR scatter stray-light in the corrected radiances.
To solve this problem, 2 stray-light kernels at 1028 nm and 1039 nm were added, corresponding respectively to the maximum of the NIR scatter curve and to the upper wavelength edge of band Oa21.
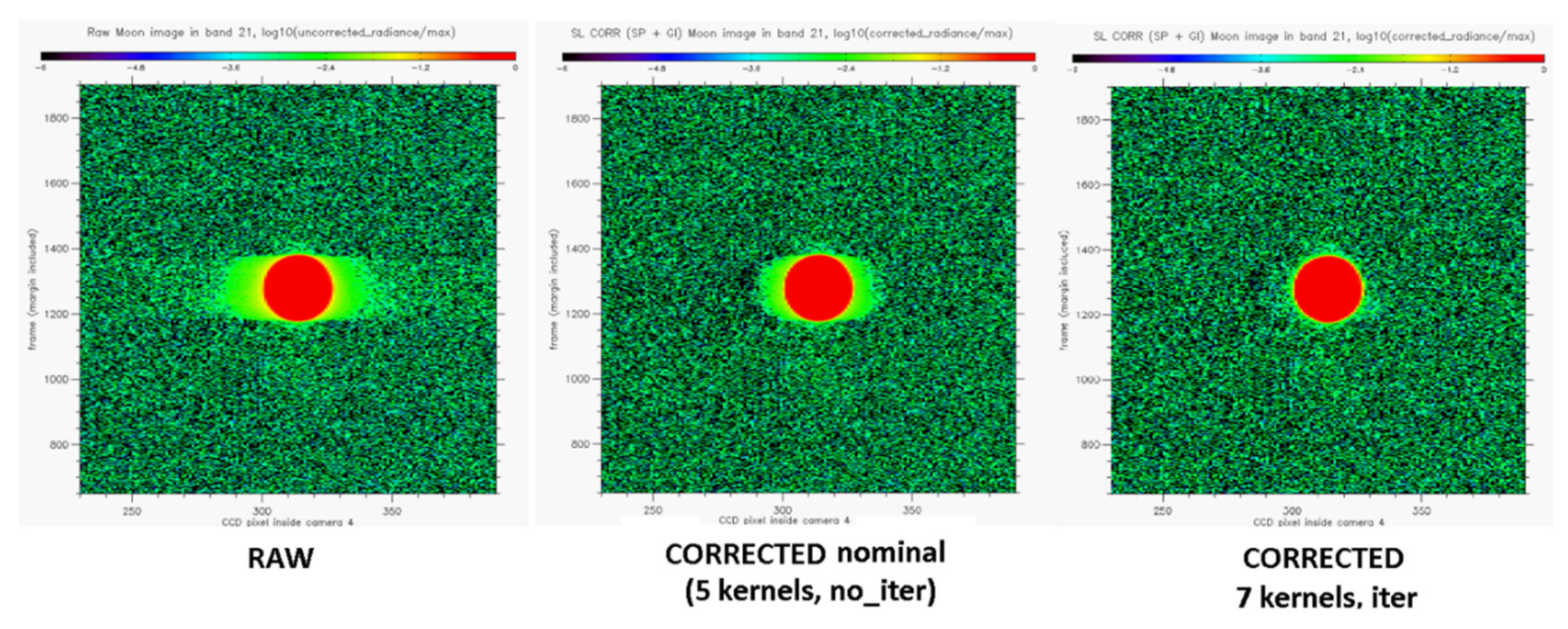
Stray-light correction was tested with these two additional kernels on the moon data, and very promising results were obtained, especially when coupled with the iterative method (described above). As illustrated in
Figure 5: the green ACT pattern present on both sides of the moon (left plot, left and right of the moon disk) is residual NIR scatter stray-light: it almost completely disappears when using seven kernels and iterative method (right plot).
2.2.3. Possible Improvements to Earth Observation Data
In
Section 2.2.2, the positive impact on moon data of the SL correction improvements (iterative method and additional kernels) was presented. Even though stray-light correction performance assessment is more difficult (especially quantitatively) on Earth Observation (EO), the new methods on EO scenes were applied and provided evidence of the expected improvements.
Figure 6 illustrates the improvement brought to Oa20 by the iterative method applied on an OLCI-A Earth Observation. It shows that, as for the moon observation, overcorrection next to the ACT bright/dark transition (here water/land) was significantly reduced.
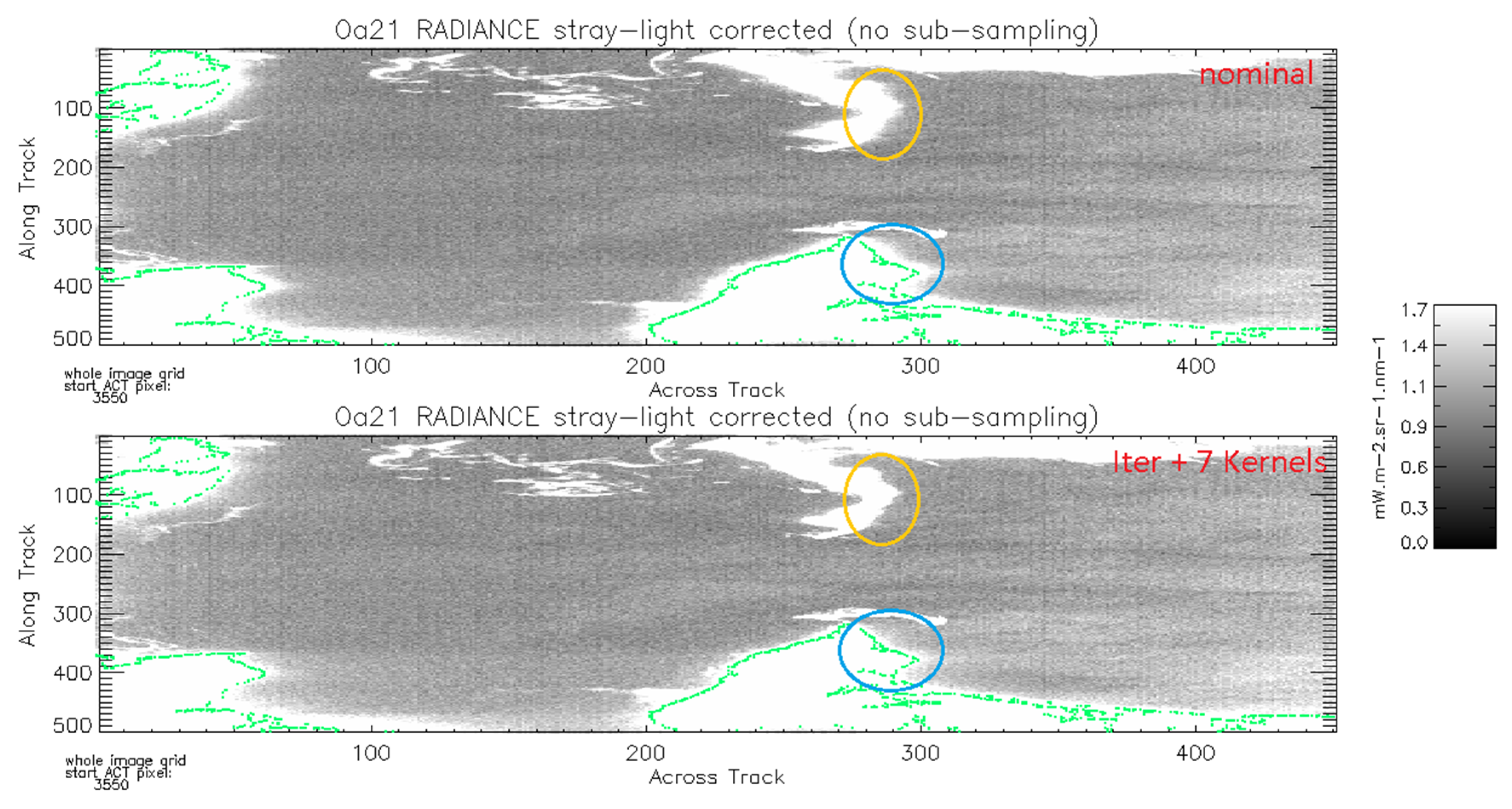
Figure 7 illustrates the improvement brought to band Oa21 by the two additional kernels when applied on an OLCI-B Earth observation. It shows that, as for the moon observation, ACT residual NIR scatter stray-light (thus an SL undercorrection) next to the ACT bright/dark transition (here land/water and cloud/water) was significantly reduced when considering the additional kernels (combined with the iterative method). One can see that the additional kernels at 1028 nm and 1039.75 nm allowed decreasing the residual NIR-scatter stray-light. Indeed, one can see in this image that:
The location of the transition between the bright and dark pixels in the land/water interfaces was now closer to the coastline (see blue circle as an example).
The transition between bright and dark pixels in the cloud/water interface became sharper (see orange circle as an example).
2.3. Oversampling of Moon Data
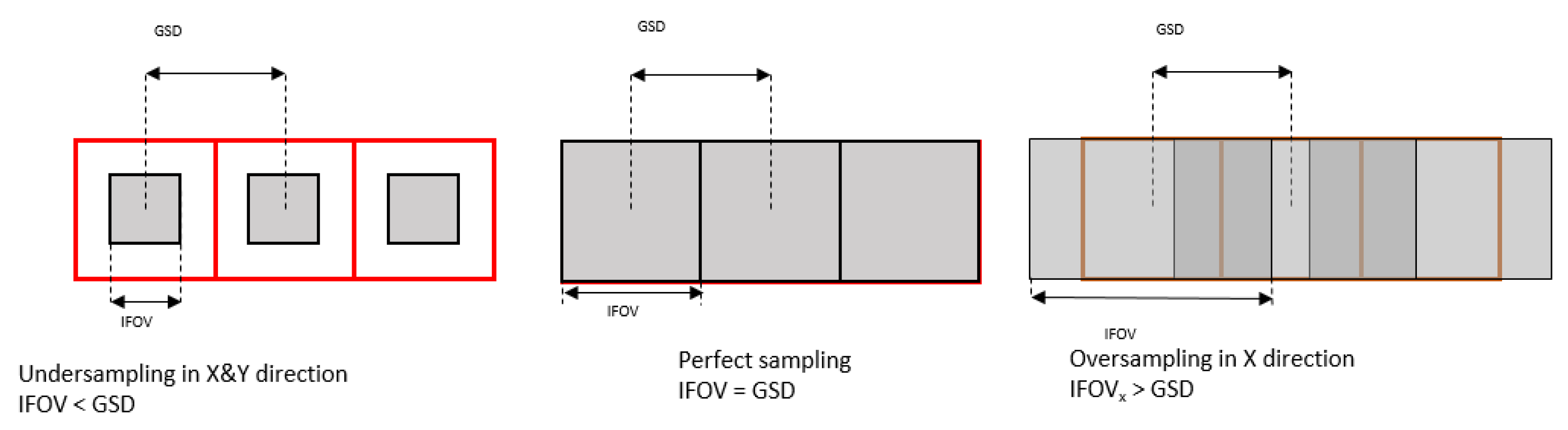
OLCI has been designed to observe the Earth from a specific orbit, at a specific spatial resolution, with a specific internal clock for the acquisitions. The distance between the spacecraft and the moon is much larger than the distance between the satellite and the Earth, which causes the lunar acquisitions to be oversampled as the satellite flies at its nominal speed. Oversampling (
Figure 8) is a phenomenon that occurs when the distance between the centers of neighboring pixels (ground sampling distance—GSD) is smaller than the pixel instantaneous field of view (IFOV).
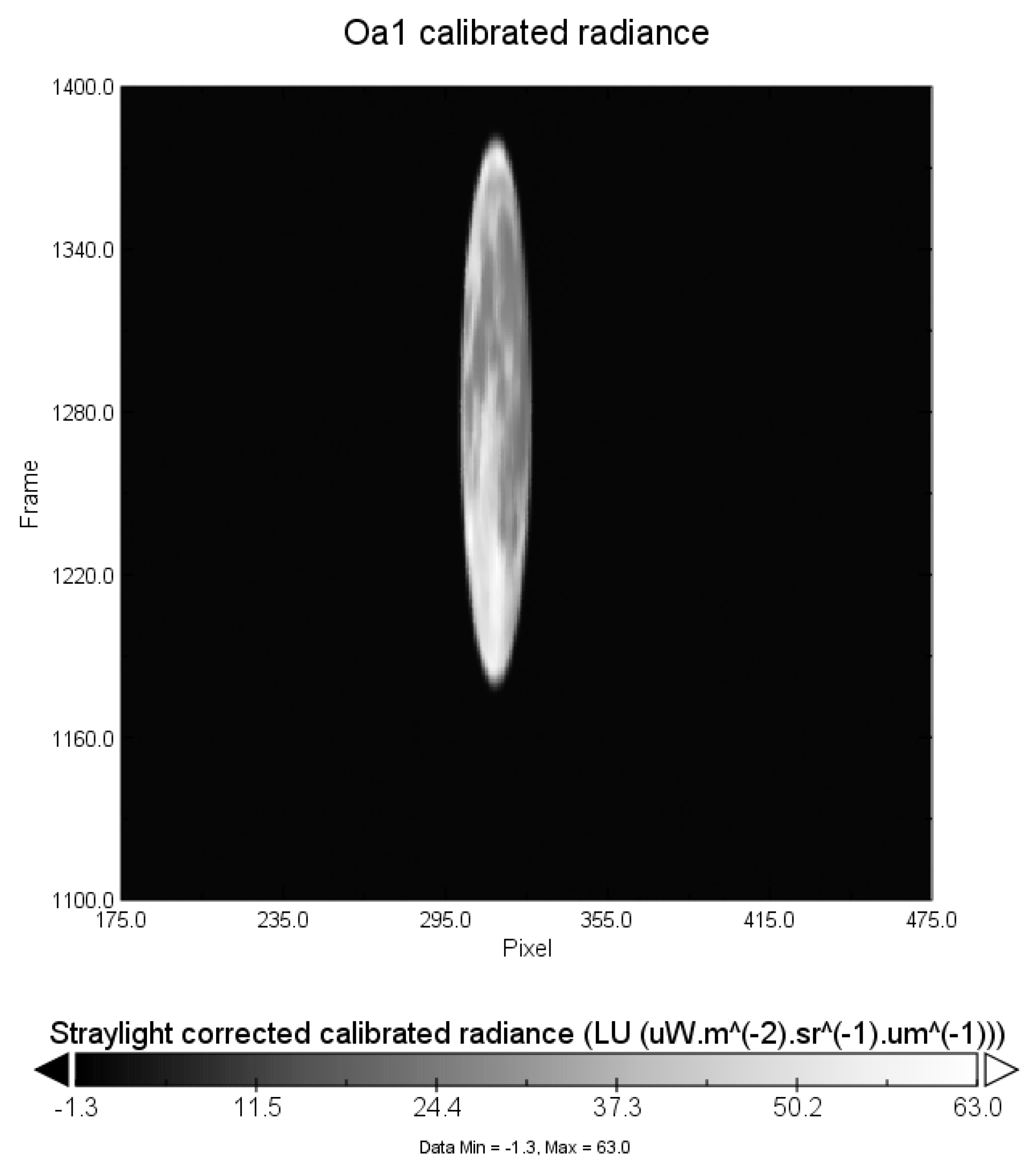
OLCI moon observation data is oversampled in flight (along-track—ALT) direction; the moon appears as elongated ellipse (
Figure 9). Since the instrument is essentially a scanner, the along-track dimension of the image is built by satellite motion; the sampling time must be tuned to “match” the velocity of the satellite. This does not hold when observing the moon in nominal Earth Observation mode—the FOV diverges, while the orbital velocity and integration time (contributing to pixel pitch) remain the same. Since image in the across-track (ACT) direction is formed by the same array of detectors, their angular FOV and pixel separation remain the same, as during Earth Observation—there is no ACT oversampling. This instance of oversampling effect could be mimicked if we used an office scanner to scan a printed image of the moon, while slowly pulling the paper in the direction of scanners motion.
An accurate estimate of the oversampling factor is needed to both correct the image and analyze the radiance values. This estimate can be inferred from the orbit and instrument characteristics. Since the spacecraft completes one orbit in 100 min, the average angular velocity is . During 44 ms (sampling time), the instrument covers an angular distance of 46 µrad. Compared to the distance between S3 and the Moon, the linear displacement of the satellite during this period is negligible, and this angle can be treated as the moon observation angular sampling step in ALT direction. When the instrument looks at the Earth, the subsatellite point (SSP) moves by a distance of . This linear pixel displacement seen from 814 km orbit forms angle . The oversampling factor is the ratio of those two: .
This calculation can be expressed as:
where
is the angular velocity of the spacecraft,
is the sampling time,
is the mean Earth radius, and
is the orbit height (above sea level). Most of the terms cancel out, and oversampling becomes a function of orbit height. This calculation of the oversampling ratio is assuming perfect sampling of Earth data form given orbit height. Based on a range of values of the calculated oversampling ratio derived with different parameters, the overall uncertainty is estimated at 2.5% of the calculated value.
It is important to notice that the instrument is assumed to sample from its orbit perfectly and that the moon is assumed to be sufficiently far to neglect displacement of the instrument between consecutive frames.
The oversampling factor is sometimes estimated using an ellipse fitting algorithm to fit the moon shape. However, this approach is not recommended [
18] even for high illumination conditions as the fitting procedure parameters (e.g., the threshold on the quantization), as well as potential artifacts in the image, such as stray-light or ghosts, may lead to erroneous estimates of the oversampling factor. During this activity, ellipse fitting was only used to locate the moon and to automatically find the region of interest on the lunar scan and delimit the area of irradiance integration to the moon disc (with an additional fringe to ensure all moon pixels were included).
2.4. Irradiance Calculation
To assess the inflight radiometric performance of an instrument that has acquired lunar imagery, actual observations have to be compared to models. Such models spectrally simulate the moon signal for the specific geometrical conditions of the acquiring instrument at the time of the observation. Community reference models like ROLO) or GIRO estimate the reflectance spectrum of the moon as a function of time and satellite position and infer the lunar irradiance at instrument entry based on the solar irradiance. The observed lunar irradiance is estimated by integrating the lunar radiances recorded by the instrument.
Spectral irradiance is the integral of spectral radiance over a given surface.
where
is the spectral irradiance coming from an area delimited by
—solid angle of the integrated surface,
is the spectral radiance coming from point (x, y). In the case of discrete spectral radiances recorded by OLCI, integration is replaced by summation. Summation is performed over a range of points
that contribute to surface
. The infinitesimal solid–angular increment
is replaced by
—IFOV solid angle related to sample
n.
A spectral radiance product of IPF-D was used in this study. It provided radiance values for each pixel in each scan of each band, corrected for effects normally influencing readouts during any observation (e.g., smear, nonlinearity, and stray-light). Values were corrected for oversampling () and appropriate IFOV values were assigned to each CCD pixel ().
The IFOV solid angle of a pixel can be estimated based on the ground pixel size. If we assume nadir pixel is 272 m ACT and 294 m ALT, and spacecraft is on 810 km orbit, the IFOV can be estimated as surface area divided by distance square:
Valid for the central pixel of the CCD. A more accurate value can be calculated based on the detector pixel pitch and focal length. If we take focal length f = 67.3 mm and pixel pitch ν = 0.0225mm (from instrument specification), we can calculate FOV in both directions: ACT— ALT—.
This results in a solid angle:
ACT IFOV of pixel n (counting from the middle of CCD) can be calculated as ACT IFOV of n pixels minus ACT IFOV of n-1 pixels: . ALT IFOV was limited by spectrometer slit and was assumed to be constant—simulated differences were lower than 0.2%.
The most accurate value of detector IFOVs was based on ground tests and simulations performed during instrument assembly and acceptance (
Figure 10). The uncertainty of the IFOV solid angle was estimated based on test requirements at 1.4%.
After accounting for oversampling and solid angle, the scene irradiance can be calculated and verified against a lunar irradiance model. It is worth pointing out that OLCI data is radiometrically calibrated by a ground data processor (IPF) that applies calibration inferred from an onboard solar diffuser, providing Level 1b radiance product. At instrument level, calculation of the observed irradiance reduces to a summation of radiances inside the moon disc (multiplied by respective solid angles) and correcting for oversampling. With this approach, any discrepancy between modeled irradiance and calculated instrument irradiance can indicate imperfection in processing chain or instrument radiometry (within the uncertainty range of modeled irradiance).
2.5. The GIRO Model
The GIRO model [
10] has been developed by EUMETSAT in collaboration with United States Geological Survey (USGS). It has been endorsed by the Lunar Calibration Community, which encompasses the GSICS Research Working Group and the Comitee on Earth Observation Satellites (CEOS) Working Group on Calibration & Validation (WGCV) Infrared and Visible Optical Sensors Subgroup (IVOS), as the common lunar calibration reference model [
17,
18].
It is an implementation of the ROLO model [
5] where the lunar disk reflectance, within the interval [350 nm, 2500 nm], is described by the following equation:
where
denotes the wavelength band,
is the absolute phase angle,
are the selenographic latitude and longitude of the observer (spacecraft), and
is the selenographic longitude of the sun. Parameters
were retrieved from a fitting procedure making use of the extensive dataset acquired by the ROLO telescopes over more than eight years. The GIRO implemented the coefficients available in [
5].
Reflectance is converted to spectral irradiance as follows:
where
is the solid angle of the moon,
denotes solar spectral irradiance in band
(corresponding to wavelength
).
The GIRO was validated against the ROLO on an extensive set of data acquired by the SEVIRI instrument aboard Meteosat-8, 9, and 10. Additional comparisons were successfully made with instruments such as MODIS aboard Terra and Aqua or Suomi NPP VIIRS for the First Joint GSICS/IVOS Lunar Calibration Workshop to consolidate this validation [
17].
The GIRO provides the lunar irradiance for the reflective solar bands of the processed radiometer at the instrument level. The range of phases covered by the model was |2, 92| degrees, as for the ROLO. The current uncertainties of the GIRO model for absolute calibration were between 5% and 10%, following the assessment made for the ROLO model [
21]. However, for stability monitoring, the estimated uncertainty achieved less than 0.5% and even closer to 0.1% for long time series with consistent high illumination conditions [
7,
21].
2.6. Lunar Irradiance Model ESA—LIME
In a recent project led by the National Physical Laboratory (NPL) in collaboration with the University of Valladolid and Flemish Institute for Technological Research (VITO) (funded by ESA), new lunar irradiance model—LIME (Lunar Irradiance Model ESA)—was developed.
LIME aimed at deriving an improved lunar irradiance model with sub-2% absolute radiometric uncertainty, SI traceable, based on new lunar observations carried out with a lunar photometer operated from the ground at the Pico Teide in Tenerife (Spain). The instrument was calibrated and characterized at NPL and operated from March 2018 to June 2019, providing around 150 useful nights of lunar observations that allowed deriving the first version of LIME. Additionally, wavelength dependency was introduced for several coefficients. The uncertainty analysis of the model output in the lunar photometer spectral bands led to an uncertainty of about 2% (k=2). Initial comparison to the GIRO model and a time series of EO satellite measurements (PROBA-V and Pléïades) was performed. A detailed description of the model and results of the comparison are available at 15. The photometer is still in operation. The model will be updated on a yearly basis based on an extended set of measurements.
In the current implementation of LIME, it provides lunar reflectance and irradiance at normalized distances. To compare instrument irradiance with LIME, it should be normalized to LIME geometry by following:
where
denotes spectral irradiance in LIME observation geometry,
denotes spectral irradiance in satellite observation geometry,
denotes the distance between the sun and the moon,
denote the distance between the vehicle and the moon. This normalization is performed externally to reduce the number of regression parameters in the model.

 ,
, 
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}