Using UAV Photogrammetry to Analyse Changes in the Coastal Zone Based on the Sopot Tombolo (Salient) Measurement Project

 ,
,  ,
,  , ,
, ,
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Data Acquisition Process
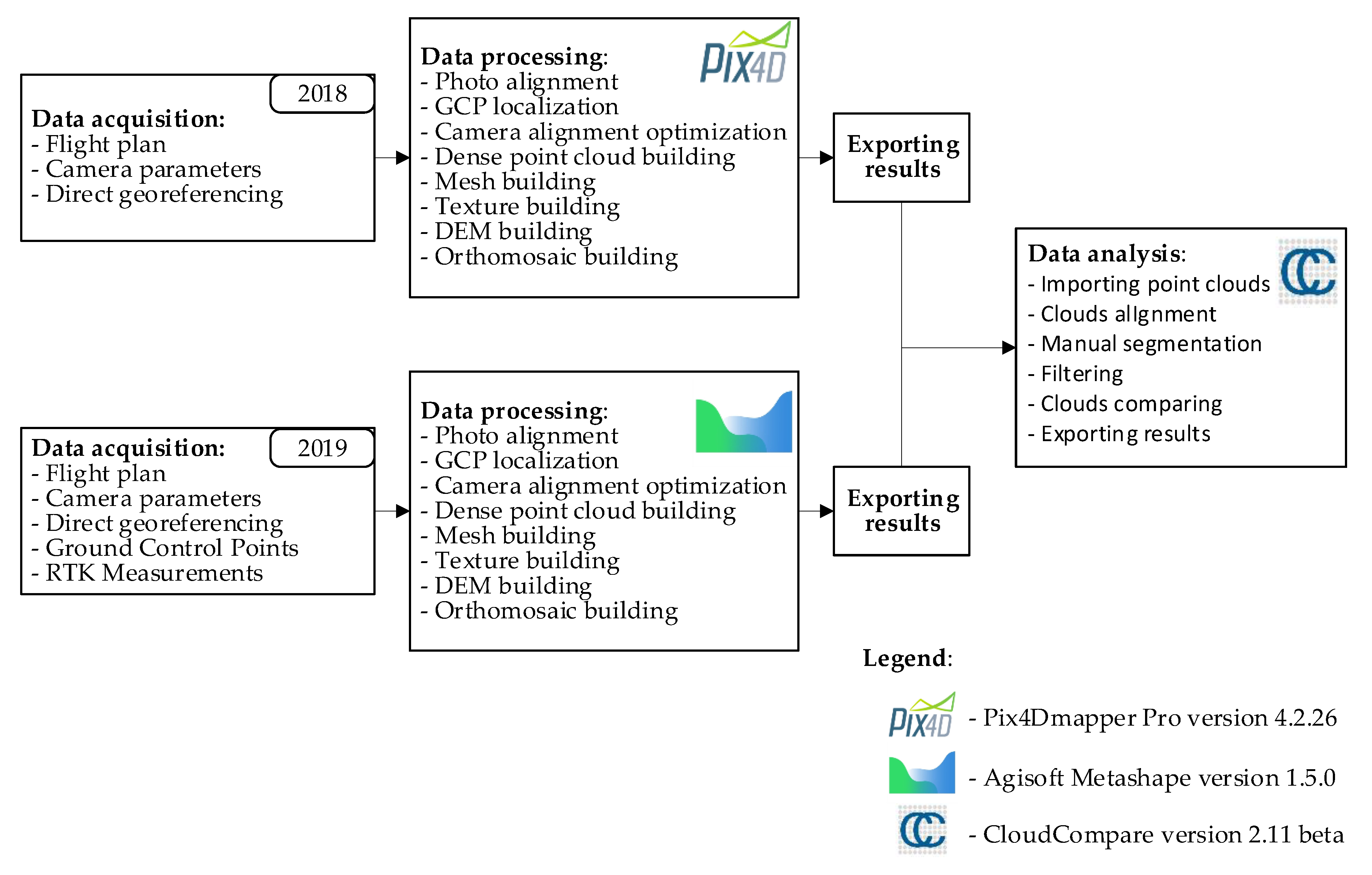
2.2. Processing of Photogrammetric Data
- application of georeferencing directly and/or through the use of ground control points, standard processing settings (as proposed by the software);
- exporting results in the form of a high-density point cloud to LAS format, a surface model to OBJ format and a numerical coverage model and orthophotomap to TIFF format;
- the UAV navigation system records camera position relative to the WGS84 ellipsoid and represents it with geodetic coordinates B, L and h (latitude, longitude, ellipsoidal height);
- position of the photogrammetric warp points is expressed in coordinates in the Polish PL-2000 system of flat coordinates, and their altitude is expressed relative to the quasigeoid in the Polish PL-EVRF2007-NH altitude system;
- the location of ground control points is measured with an accurate method of differential satellite positioning GNSS RTK (accuracy 2 cm, p = 0.95);
- the Polish PL-2000 flat coordinate system is the target coordinate system of the study;
- altitudes are related to the quasigeoid PL-EVRF2007-NH.
2.3. Accuracy Characteristics of Photogrammetric Studies
3. Results
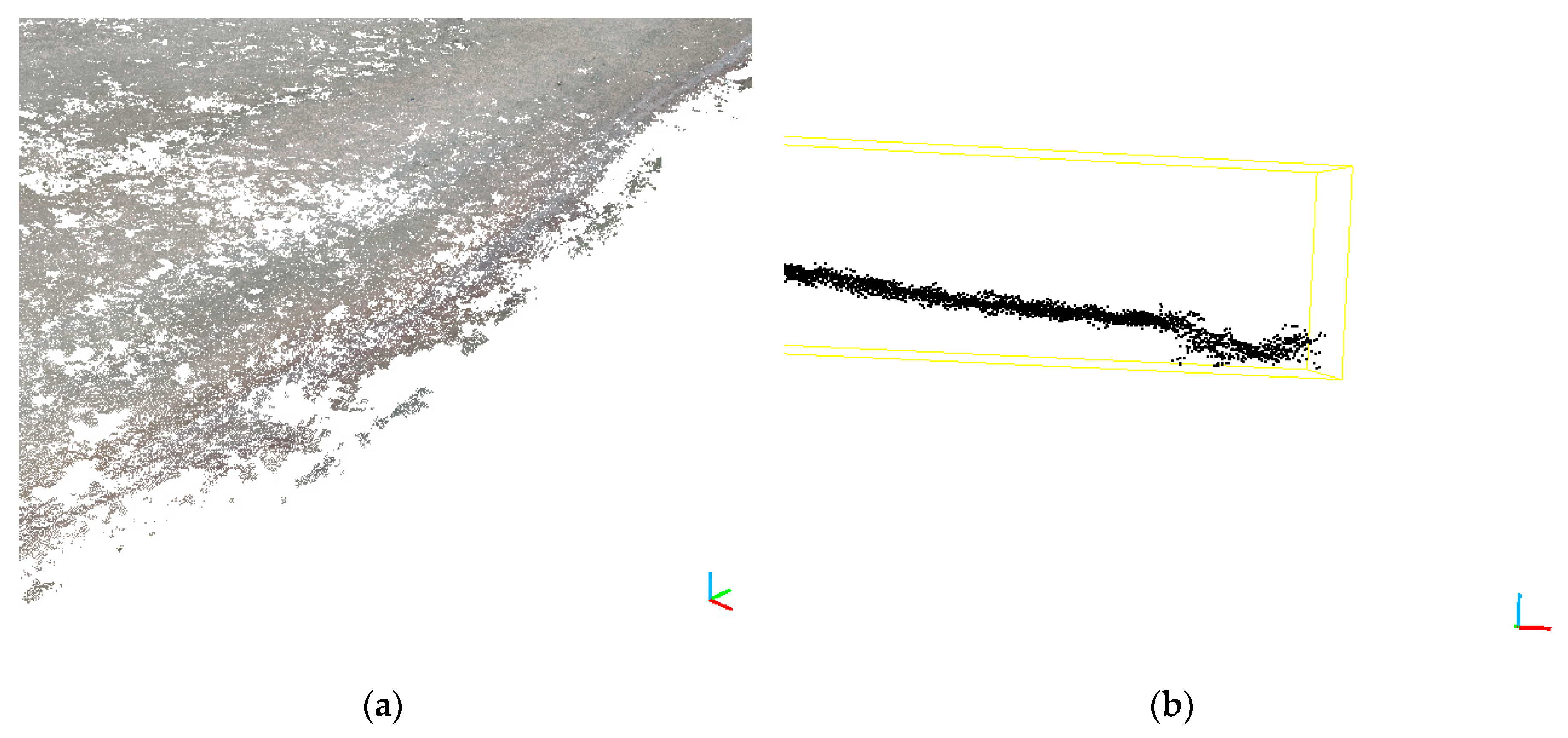
3.1. Filtration of Point Clouds
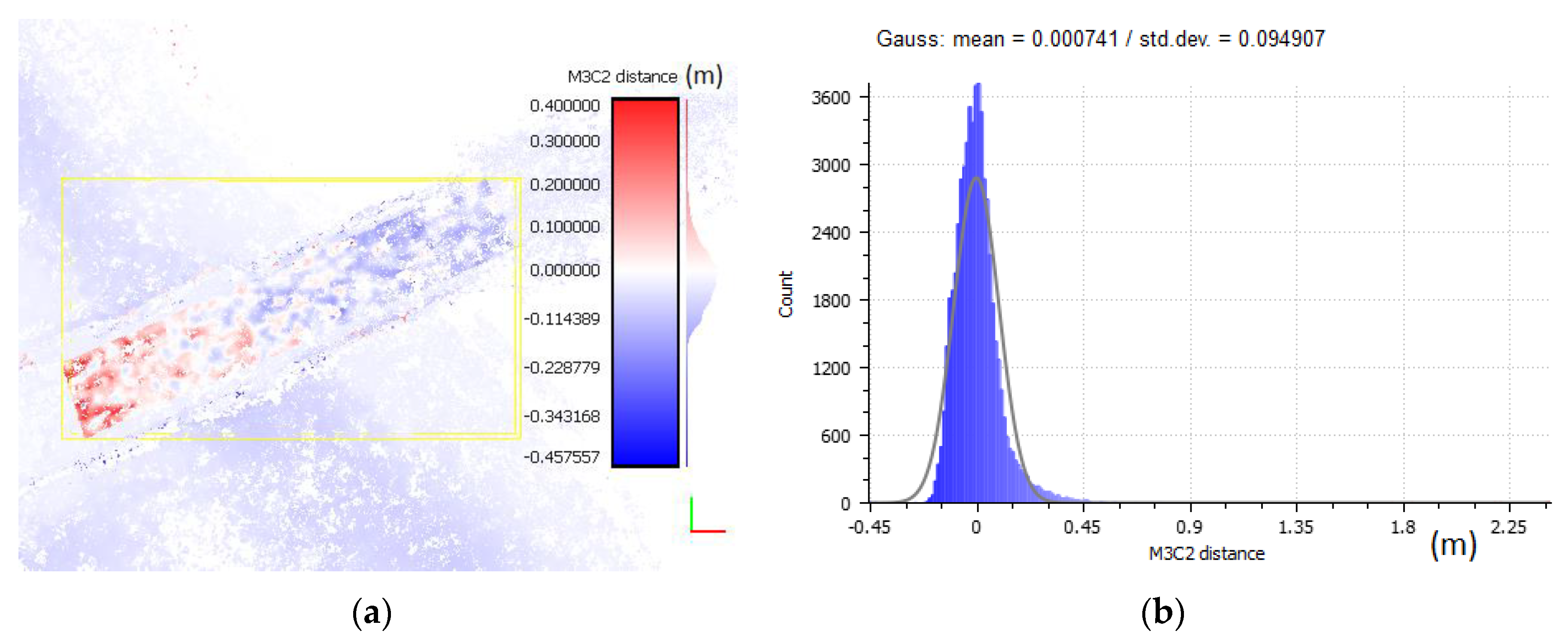
3.2. Precision Cloud Fit
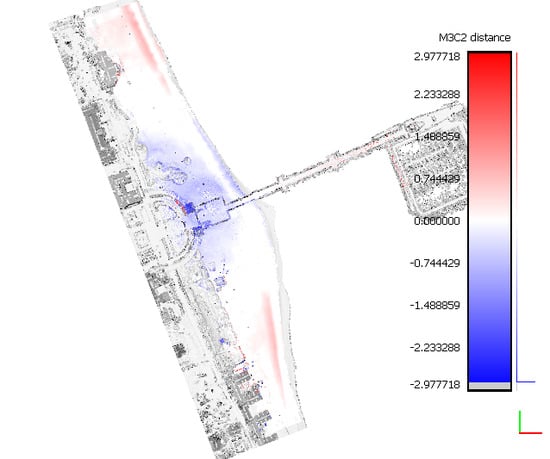
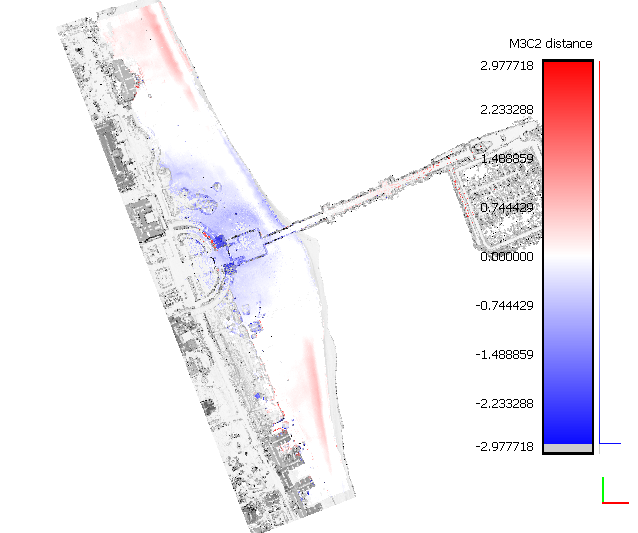
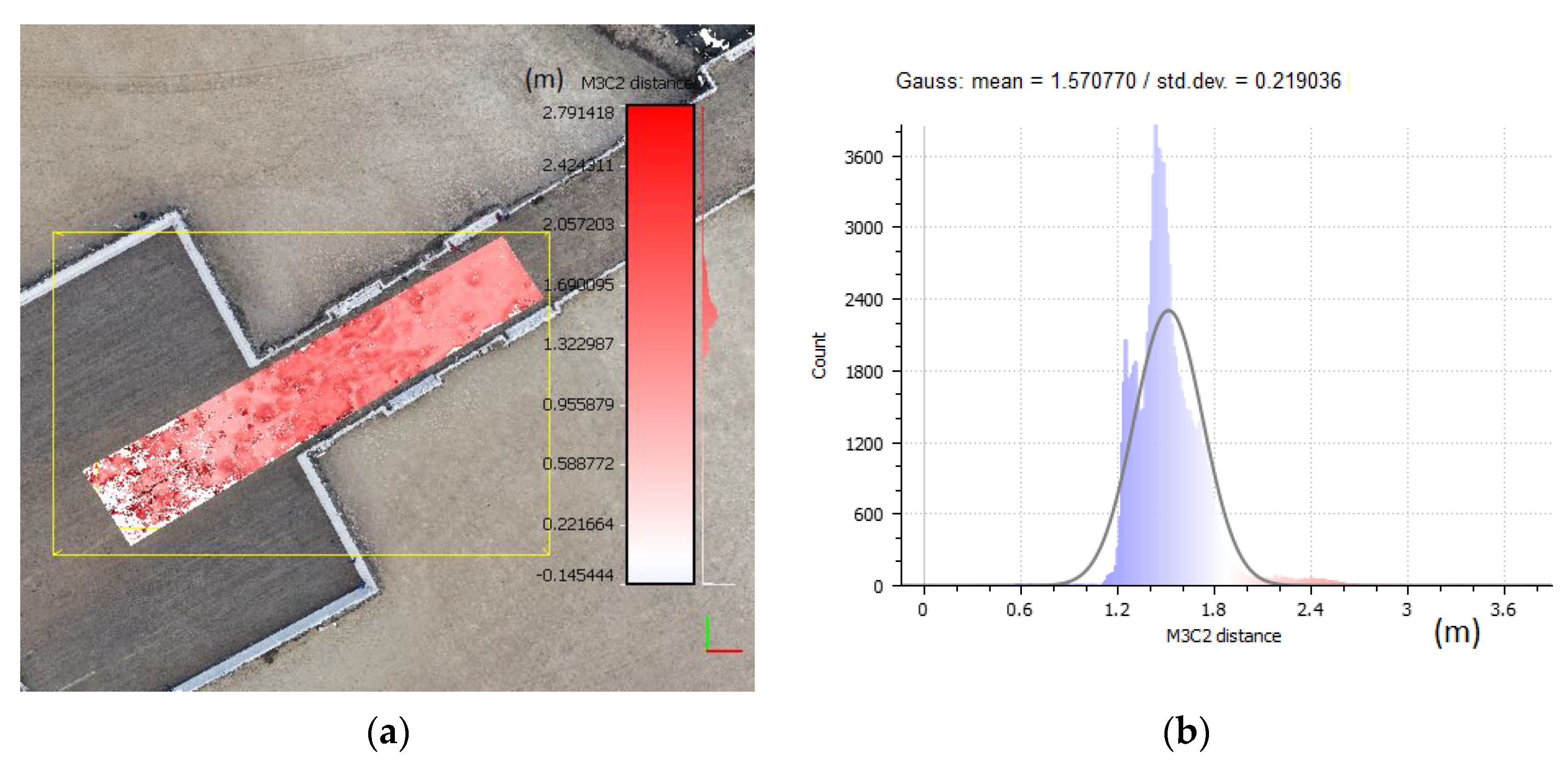
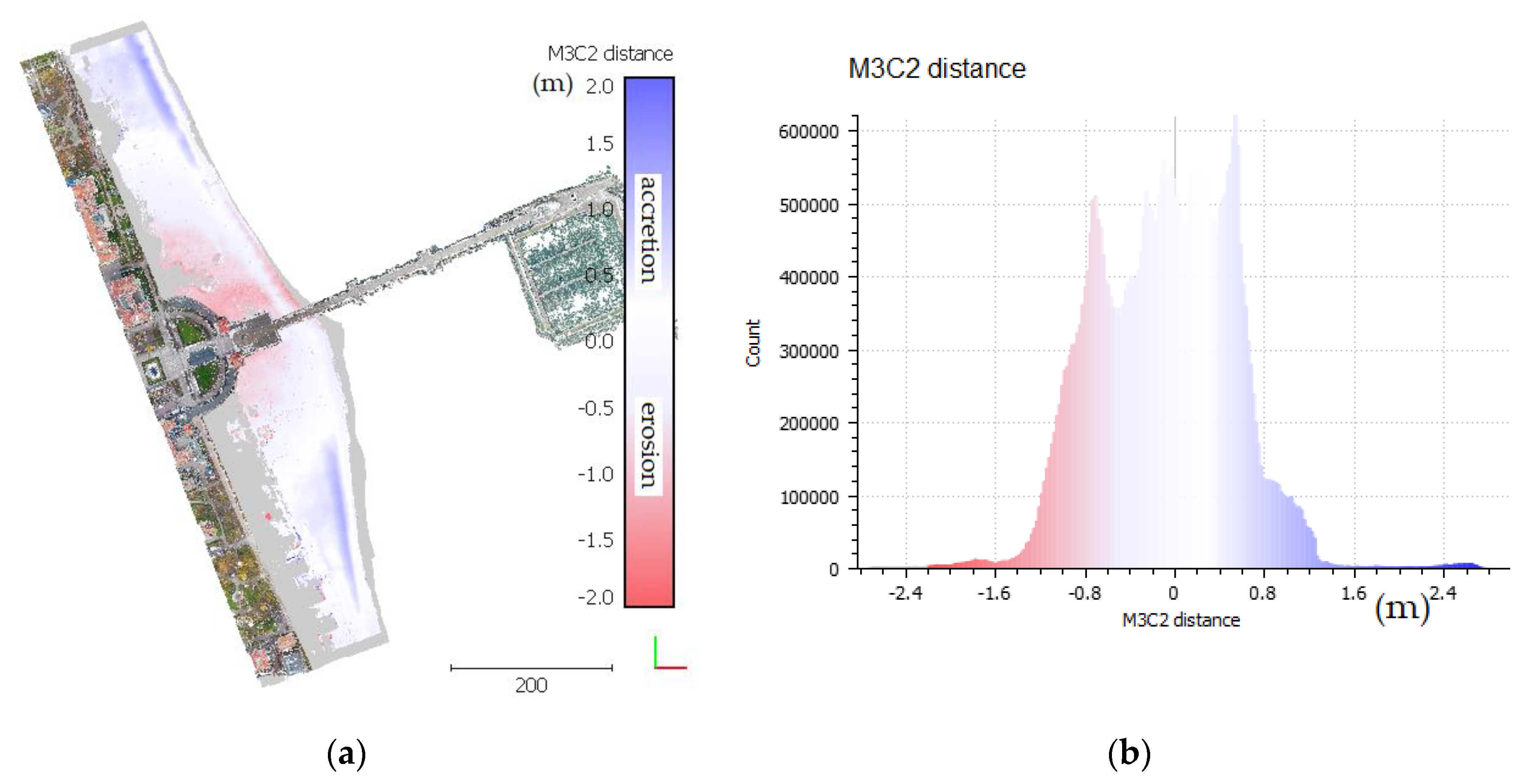
3.3. Detection of Changes
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Remondino, F.; Barazzetti, L.; Nex, F.; Scaioni, M.; Sarazzi, D. UAV photogrammetry for mapping and 3d modelling-current status and future perspectives. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, 38, C22. [Google Scholar]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Nex, F. UAV-g 2019: Unmanned Aerial Vehicles in Geomatics. Drones 2019, 3, 74. [Google Scholar] [CrossRef] [Green Version]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. Isprs J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Stateczny, A.; Burdziakowski, P. Universal Autonomous Control and Management System for Multipurpose Unmanned Surface Vessel. Pol. Marit. Res. 2019, 26, 30–39. [Google Scholar] [CrossRef] [Green Version]
- Mirijovsky, J.; Vavra, A. UAV photogrammetry in fluvial geomorphology. Int. Multidiscip. Sci. Geoconf. Sgem: Surv. Geol. Min. Ecol. Manag. 2012, 2, 909. [Google Scholar]
- Lu, C.-H. Applying UAV and photogrammetry to monitor the morphological changes along the beach in Penghu islands. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci 2016, 41, 1153–1156. [Google Scholar] [CrossRef]
- Torresan, C.; Berton, A.; Carotenuto, F.; Di Gennaro, S.F.; Gioli, B.; Matese, A.; Miglietta, F.; Vagnoli, C.; Zaldei, A.; Wallace, L. Forestry applications of UAVs in Europe: A review. Int. J. Remote Sens. 2017, 38, 2427–2447. [Google Scholar] [CrossRef]
- Özcan, O.; Akay, S.S. Modeling Morphodynamic Processes in Meandering Rivers with UAV-Based Measurements. In Proceedings of the IGARSS 2018-2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 7886–7889. [Google Scholar]
- Migon, P. Geomorphological Landscapes of the World; Springer Science & Business Media: Berlin, Germany, 2010. [Google Scholar]
- Migoń, P.; Kasprzak, M. Pathways of geomorphic evolution of sandstone escarpments in the Góry Stołowe tableland (SW Poland)—Insights from LiDAR-based high-resolution DEM. Geomorphology 2016, 260, 51–63. [Google Scholar] [CrossRef]
- Jurecka, M.; Niedzielski, T.; Migoń, P. A novel GIS-based tool for estimating present-day ocean reference depth using automatically processed gridded bathymetry data. Geomorphology 2016, 260, 91–98. [Google Scholar] [CrossRef]
- Tysiac, P.; Wojtowicz, A.; Szulwic, J. Coastal Cliffs Monitoring and Prediction of Displacements Using Terrestial Laser Scanning. In Proceedings of the 2016 Baltic Geodetic Congress (BGC Geomatics), Gdansk, Poland, 2–4 June 2016; pp. 61–66. [Google Scholar]
- Yaakob, O.; Mohamed, Z.; Hanafiah, M.S.; Suprayogi, D.T.; Abdul Ghani, M.A.; Adnan, F.A.; Mukti, M.A.A.; Din, J. Development of unmanned surface vehicle (USV) for sea patrol and environmental monitoring. In Proceedings of the International Conference on Marine Technology, Kuala Terengganu, Malaysia, 20–22 October 2012; pp. 20–22. [Google Scholar]
- Zou, X.; Xiao, C.; Zhan, W.; Zhou, C.; Xiu, S.; Yuan, H. A Novel Water-Shore-Line Detection Method for USV Autonomous Navigation. Sensors 2020, 20, 1682. [Google Scholar] [CrossRef] [Green Version]
- Ewertowski, M.W.; Tomczyk, A.M.; Evans, D.J.A.; Roberts, D.H.; Ewertowski, W. Operational framework for rapid, very-high resolution mapping of glacial geomorphology using low-cost unmanned aerial vehicles and structure-from-motion approach. Remote Sens. 2019, 11, 65. [Google Scholar] [CrossRef] [Green Version]
- Hugenholtz, C.H.; Whitehead, K.; Brown, O.W.; Barchyn, T.E.; Moorman, B.J.; LeClair, A.; Riddell, K.; Hamilton, T. Geomorphological mapping with a small unmanned aircraft system (sUAS): Feature detection and accuracy assessment of a photogrammetrically-derived digital terrain model. Geomorphology 2013, 194, 16–24. [Google Scholar] [CrossRef] [Green Version]
- Wei, Y.; He, Y. Automatic water line detection for an USV system. In Proceedings of the 2016 IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), Chengdu, China, 19–22 June 2016; pp. 261–266. [Google Scholar]
- Pérez-Hernández, E.; Ferrer-Valero, N.; Hernández-Calvento, L. Lost and preserved coastal landforms after urban growth. The case of Las Palmas de Gran Canaria city (Canary Islands, Spain). J. Coast. Conserv. 2020, 24, 1–17. [Google Scholar]
- Lawry, E.A.; Lauchlan Arrowsmith, C.S. Monitoring of geotextile offshore breakwaters to enhance mangrove revegetation. In Proceedings of the Australasian Coasts & Ports Conference 2015: 22nd Australasian Coastal and Ocean Engineering Conference and the 15th Australasian Port and Harbour Conference, Auckland, New Zealand, 15–18 September 2015; p. 497. [Google Scholar]
- Morang, A.; Williams, G.G.; Swean, J.W. Beach Erosion Mitigation and Sediment Management Alternatives at Wallops Island, VA; Coastal and Hydraulics Laboratory, US Army Corps of Engineers, Engineering Research and Development Center: Vicksburg, Mississippi, 2006. [Google Scholar]
- Wozencraft, J.M.; Lillycrop, W.J. SHOALS airborne coastal mapping: Past, present, and future. J. Coast. Res. 2003, 207–215. [Google Scholar]
- Rezaee, M.; Golshani, A.; Mousavizadegan, H. A New Methodology to Analysis and Predict Shoreline Changes Due to Human Interventions (Case Study: Javad Al-Aemmeh port, Iran). Int. J. Marit. Technol. 2019, 12, 9–23. [Google Scholar] [CrossRef] [Green Version]
- Szulwic, J.; Burdziakowski, P.; Janowski, A.; Przyborski, M.; Tysiąc, P.; Wojtowicz, A.; Kholodkov, A.; Matysik, K.; Matysik, M. Maritime Laser Scanning as the Source for Spatial Data. Pol. Marit. Res. 2015, 22, 9–14. [Google Scholar] [CrossRef] [Green Version]
- Scarelli, F.M.; Cantelli, L.; Barboza, E.G.; Rosa, M.L.C.C.; Gabbianelli, G. Natural and Anthropogenic Coastal System Comparison Using DSM from a Low Cost UAV Survey (Capão Novo, RS/Brazil). J. Coast. Res. 2016, 75, 1232–1236. [Google Scholar] [CrossRef]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using Unmanned Aerial Vehicles (UAV) for High-Resolution Reconstruction of Topography: The Structure from Motion Approach on Coastal Environments. Remote Sens. 2013, 5, 6880–6898. [Google Scholar] [CrossRef] [Green Version]
- Stateczny, A.; Gronska-Sledz, D.; Motyl, W. Precise Bathymetry as a Step Towards Producing Bathymetric Electronic Navigational Charts for Comparative (Terrain Reference) Navigation. J. Navig. 2019, 72, 1623–1632. [Google Scholar] [CrossRef]
- Stateczny, A.; Wlodarczyk-Sielicka, M.; Gronska, D.; Motyl, W. Multibeam Echosounder and LiDAR in Process of 360-Degree Numerical Map Production for Restricted Waters with HydroDron. In Proceedings of the 2018 Baltic Geodetic Congress (BGC Geomatics), Olsztyn, Polska, 21–23 June 2018; pp. 288–292. [Google Scholar]
- Makar, A. Reliability of the Digital Sea Bottom Model Sourced by Multibeam Echosounder in Shallow Water. In Proceedings of the IOP Conference Series: Earth and Environmental Science, Prague, Czech Republic, 9–13 September 2019; Volume 362, p. 12054. [Google Scholar]
- Janowski, L.; Trzcinska, K.; Tegowski, J.; Kruss, A.; Rucinska-Zjadacz, M.; Pocwiardowski, P. Nearshore Benthic Habitat Mapping Based on Multi-Frequency, Multibeam Echosounder Data Using a Combined Object-Based Approach: A Case Study from the Rowy Site in the Southern Baltic Sea. Remote Sens. 2018, 10, 1983. [Google Scholar] [CrossRef] [Green Version]
- Salameh, E.; Frappart, F.; Almar, R.; Baptista, P.; Heygster, G.; Lubac, B.; Raucoules, D.; Almeida, L.; Bergsma, E.; Capo, S.; et al. Monitoring Beach Topography and Nearshore Bathymetry Using Spaceborne Remote Sensing: A Review. Remote Sens. 2019, 11, 2212. [Google Scholar] [CrossRef] [Green Version]
- James, M.R.; Robson, S.; Smith, M.W. 3-D uncertainty-based topographic change detection with structure-from-motion photogrammetry: Precision maps for ground control and directly georeferenced surveys. Earth Surf. Process. Landf. 2017, 42, 1769–1788. [Google Scholar] [CrossRef]
- Nourbakhshbeidokhti, S.; Kinoshita, A.M.; Chin, A.; Florsheim, J.L. A Workflow to Estimate Topographic and Volumetric Changes and Errors in Channel Sedimentation after Disturbance. Remote Sens. 2019, 11, 586. [Google Scholar] [CrossRef] [Green Version]
- Caldwell, J.M. Coastal Processes and Beach Erosion; US Army Coastal Engineering Research Center: Vicksburg, MS, USA, 1967. [Google Scholar]
- Russell, P.E. Mechanisms for beach erosion during storms. Cont. Shelf Res. 1993, 13, 1243–1265. [Google Scholar] [CrossRef]
- Migoń, P.; Pilous, V. Geomorfologia; Wydawnictwo Naukowe PWN: Warsaw, Poland, 2006. [Google Scholar]
- Pijet-Migoń, E.; Migoń, P. Chapter 6—Landform Change Due to Airport Building. In Urban Geomorphology; Thornbush, M.J., Allen, C.D., Eds.; Elsevier: Amsterdam, The Netherlands, 2018; pp. 101–111. ISBN 978-0-12-811951-8. [Google Scholar]
- Hanson, H.; Kraus, N.C. Shoreline response to a single transmissive detached breakwater. In Proceedings of the Coastal Engineering Conference, Delft, The Netherlands, 2–6 July 1990. [Google Scholar]
- McCormick, M.E. Equilibrium shoreline response to breakwaters. J. Waterw. Portcoastal Ocean. Eng. 1993, 119, 657–670. [Google Scholar] [CrossRef]
- Ming, D.; Chiew, Y.M. Shoreline changes behind detached breakwater. J. Waterw. Portcoastal Ocean. Eng. 2000, 126, 63–70. [Google Scholar] [CrossRef]
- Masnicki, R.; Specht, C.; Mindykowski, J.; Dąbrowski, P.; Specht, M. Accuracy Analysis of Measuring X-Y-Z Coordinates with Regard to the Investigation of the Tombolo Effect. Sensors 2020, 20, 1167. [Google Scholar] [CrossRef] [Green Version]
- Specht, M.; Specht, C.; Mindykowski, J.; Dąbrowski, P.; Maśnicki, R.; Makar, A. Geospatial Modeling of the Tombolo Phenomenon in Sopot Using Integrated Geodetic and Hydrographic Measurement Methods. Remote Sens. 2020, 12, 737. [Google Scholar] [CrossRef] [Green Version]
- Specht, C.; Mindykowski, J.; Dabrowski, P.; Masnicki, R.; Marchel, L.; Specht, M. Metrological aspects of the Tombolo effect investigation—Polish case study. In Proceedings of the 2019 IMEKO TC19 International Workshop on Metrology for the Sea: Learning to Measure Sea Health Parameters, MetroSea 2019, Genoa, Italy, 3–5 October 2019. [Google Scholar]
- Przyborska, A.; Jakacki, J.; Kosecki, S. The Impact of the Sopot Pier Marina on the Local Surf Zone. In Interdisciplinary Approaches for Sustainable Development Goals; Springer: Berlin/Heidelberg, Germany, 2018; pp. 93–109. [Google Scholar]
- Pix4D Support Team Types of mission. Available online: https://support.pix4d.com/hc/en-us/articles/209960726-Types-of-mission-Which-type-of-mission-to-choose (accessed on 10 May 2020).
- Hartley, R.I.; Zisserman, A. Multiple View Geometry in Computer Vision, 2nd ed.; Cambridge University Press: Cambridge, UK, 2004; ISBN 0521540518. [Google Scholar]
- Kraus, K.; Harley, I.; Kyle, S. Photogrammetry: Geometry from Images and Laser Scans; de Gruyter Textbook; Walter De Gruyter: Berlin, Germany, 2007; ISBN 9783110190076. [Google Scholar]
- Engels, C.; Stewenius, H.; Nister, D. Bundle adjustment rules. Photogrammetric Computer Vision Vol. XXXVI(3). In Proceedings of the Symposium of ISPRS Commission III Photogrammetric Computer Vision (PCV’06), Bonn, Germany, 20–22 September 2006; pp. 266–271. [Google Scholar]
- Wierzbicki, D.; Kedzierski, M.; Sekrecka, A. A Method for Dehazing Images Obtained from Low Altitudes during High-Pressure Fronts. Remote Sens. 2020, 12, 25. [Google Scholar] [CrossRef] [Green Version]
- Burdziakowski, P.; Tysiac, P. Combined Close Range Photogrammetry and Terrestrial Laser Scanning for Ship Hull Modelling. Geosciences 2019, 9, 242. [Google Scholar] [CrossRef] [Green Version]
- Burdziakowski, P. Increasing the geometrical and interpretation quality of unmanned aerial vehicle photogrammetry products using super-resolution algorithms. Remote Sens. 2020, 12, 810. [Google Scholar] [CrossRef] [Green Version]
- Pix4D Support Team Selecting the Image Acquisition Plan Type. Available online: https://support.pix4d.com/hc/en-us/articles/202557459-Step-1-Before-Starting-a-Project-1-Designing-the-Image-Acquisition-Plan-a-Selecting-the-Image-Acquisition-Plan-Type#label5 (accessed on 10 May 2020).
- Rossi, P.; Mancini, F.; Dubbini, M.; Mazzone, F.; Capra, A. Combining nadir and oblique UAV imagery to reconstruct quarry topography: Methodology and feasibility analysis. Eur. J. Remote Sens. 2017, 50, 211–221. [Google Scholar] [CrossRef]
- Specht, C.; Pawelski, J.; Smolarek, L.; Specht, M.; Dabrowski, P. Assessment of the Positioning Accuracy of DGPS and EGNOS Systems in the Bay of Gdansk using Maritime Dynamic Measurements. J. Navig. 2019, 72, 575–587. [Google Scholar] [CrossRef] [Green Version]
- GPS.gov. GPS Accuracy. Available online: https://www.gps.gov/systems/gps/performance/accuracy/ (accessed on 3 March 2020).
- Hulbert, I.A.R.; French, J. The accuracy of GPS for wildlife telemetry and habitat mapping. J. Appl. Ecol. 2001, 38, 869–878. [Google Scholar] [CrossRef]
- Barry, P.; Coakley, R. Accuracy of UAV photogrammetry compared with network RTK GPS. Int. Arch. Photogramm. Remote Sens. 2013, 2, 2731. [Google Scholar]
- Turner, D.; Lucieer, A.; Wallace, L. Direct georeferencing of ultrahigh-resolution UAV imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2738–2745. [Google Scholar] [CrossRef]
- Khan, N.Y.; McCane, B.; Wyvill, G. SIFT and SURF performance evaluation against various image deformations on benchmark dataset. In Proceedings of the 2011 International Conference on Digital Image Computing: Techniques and Applications, DICTA, Noosa, QL, Australia, 6–8 December 2011. [Google Scholar]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An efficient alternative to SIFT or SURF. In International Conference on Computer Vision; IEEE: Piscataway, NJ, USA, 2011. [Google Scholar]
- Lowe, G. SIFT—The Scale Invariant Feature Transform. Int. J. 2004, 2, 91–110. [Google Scholar]
- Ke, Y.; Sukthankar, R. PCA-SIFT: A more distinctive representation for local image descriptors. In Proceedings of the Computer Vision and Pattern Recognition, 2004. CVPR 2004, Washington, DC, USA, 27 June–2 July 2004; pp. II-506–II-513. [Google Scholar]
- Balta, H.; Velagic, J.; Bosschaerts, W.; Cubber, G.D.; Siciliano, B. Fast Statistical Outlier Removal Based Method for Large 3D Point Clouds of Outdoor Environments. Ifac Pap. 2018, 51, 348–353. [Google Scholar] [CrossRef]
- Rusu, R.B.; Marton, Z.C.; Blodow, N.; Dolha, M.; Beetz, M. Towards 3D Point cloud based object maps for household environments. Robot. Auton. Syst. 2008, 56, 927–941. [Google Scholar] [CrossRef]
- Yang, J.; Li, H.; Campbell, D.; Jia, Y. Go-ICP: A Globally Optimal Solution to 3D ICP Point-Set Registration. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 2241–2254. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pomerleau, F.; Colas, F.; Siegwart, R.; Magnenat, S. Comparing ICP variants on real-world data sets. Auton. Robot. 2013, 34, 133–148. [Google Scholar] [CrossRef]
- Zhang, Z. Iterative Closest Point (ICP). In Computer Vision; Springer US: Boston, MA, USA, 2014; pp. 433–434. [Google Scholar]
- Lague, D.; Brodu, N.; Leroux, J. Accurate 3D comparison of complex topography with terrestrial laser scanner: Application to the Rangitikei canyon (N-Z). Isprs J. Photogramm. Remote Sens. 2013, 82, 10–26. [Google Scholar] [CrossRef] [Green Version]
- Lague, D. Terrestrial laser scanner applied to fluvial geomorphology. In Developments in Earth Surface Processes; Tarolli, P., Mudd, S.M., Eds.; Elsevier: Amsterdam, The Netherlands, 2020; Volume 23, pp. 231–254. [Google Scholar]
- Walker, I.J.; Davidson-Arnott, R.G.D.; Bauer, B.O.; Hesp, P.A.; Delgado-Fernandez, I.; Ollerhead, J.; Smyth, T.A.G. Scale-dependent perspectives on the geomorphology and evolution of beach-dune systems. Earth Sci. Rev. 2017, 171, 220–253. [Google Scholar] [CrossRef]
- Sielski, M. Trójmiejskie Plaże Mają być czyste. Available online: https://www.trojmiasto.pl/wiadomosci/Trojmiejskie-plaze-maja-byc-czyste-n58751.html (accessed on 10 May 2020).
- Sopot, U.M. Tombolo połączy plażę z przystanią jachtową. Available online: https://sopot.gmina.pl/raport-marina-tombolo-2016/ (accessed on 3 March 2020).
- Instytut Meteorologii i Gospodarki Wodnej. Assessment of the Impact of Current and Future Climate Change on the Polish Coastal Zone and the Baltic Sea Ecosystem; Instytut Meteorologii i Gospodarki Wodnej: Gdynia, Poland, 2014. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technical Data | DJI Mavic PRO | DJI Mavic PRO 2 |
|---|---|---|
| Dimensions (L × W × H) (mm) | 305 × 244 × 85 | 322 × 242 × 84 |
| Weight (g) | 734 | 907 |
| Maximum rising speed (m/s) | 5 | 5 |
| Maximum ascending velocity (m/s) | 3 | 3 |
| Maximum advance velocity (km/h) | 65 | 72 |
| Maximum altitude (m) | 5000 | 6000 |
| Maximum flight time (min) | 27 | 31 |
| Maximum hovering time (min) | 24 | 29 |
| Mean flight time (min) | 21 | 25 |
| Maximum flight range (km) | 13 | 18 |
| Permissible operating temperature range (°C) | 0 to 40 | −10 to 40 |
| Satellite Navigation Systems | GPS/GLONASS | GPS/GLONASS |
| Technical Data | F230 | L1D-20c (Hasselblad) |
|---|---|---|
| Sensor size | 1/2.3”, 12.35 MP | 1”, 20 MP |
| Pixel size (μm) | 1.55 | 2.41 |
| Lenses (Field of vision—FOV) | FOV 78.8° (28 mm 1) f/2.2 | FOV 77° (28 mm 1) f/2.2 |
| Focus | from 0.5 m to ∞, auto/manual focus | from 1 m to ∞, auto/manual focus |
| ISO sensitivity range | 100–3200 (video), 100–1600 (photo) | 100–6400 (video), 100–12,800 (photo) |
| Electronic shutter time | 8 s–1/8000 s | 8 s–1/8000 s |
| Image size (pixel) | 4000 × 3000 | 5472 × 3648 |
| Photo modes | Single shot, Burst shooting: 3/5/7 frames, Auto Exposure Bracketing (AEB): 3/5 bracketed frames at 0.7 EV, Interval | Single shot, Burst shooting: 3/5 frames, Auto Exposure Bracketing (AEB): 3/5 bracketed frames at 0.7 EV, Interval |
| Video modes | C4K: 4096 × 2160, 24 fps | 4K: 3840 × 2160 24/25/30 p |
| 4K: 3840 × 2160, 24/25/30 fps | 2.7K: 2688 × 1512 | |
| 2.7K: 2720 × 1530, 24/25/30 fps | 24/25/30/48/50/60 p | |
| FHD: 1920 × 1080, 24/25/30/48/50/60/96 fps | FHD: 1920 × 1080 | |
| HD: 1280 × 720, 24/25/30/48/50/60/120 fps | 24/25/30/48/50/60/120 p | |
| Image file format | JPEG, DNG | |
| Video file format | MP4, MOV (MPEG-4 AVC/H.264) | MP4/MOV (MPEG-4 AVC/H.264, HEVC/H.265) |
| 2018 Priority Area | 2018 Auxiliary Area | 2019 | |
|---|---|---|---|
| Flight path | Double grid | Free flight | Single grid |
| Ground sampling distance (GSD) | 2.25 | 8.4 | 2.21 |
| Number of photos taken | 621 | 413 | 462 |
| Coverage (longitudinal/traverse) (%) | 80/80 | 85–95/85–95 | 65/65 |
| Flight altitude above ground level (AGL) | 60 | 150–260 | 100 |
| Parameter | 2018 | 2019 |
|---|---|---|
| Ground control points (GCP) | No | Yes |
| Total number of images with georeferencing | 1037 | 462 |
| Number of images used for modelling | 964 | 233 |
| GCP measurement accuracy | NA * | RTK GPS |
| Mean reprojection error (pix) | 0.301 | 0.514 |
| Total number of TPs connection points (3D) | 1,454,125 | 218,226 |
| Median of key points per image | 19,475 | 40,000 |
| Direct georeference | GPS | GPS |
| Median matches per image | 4717.91 | 4000 |
| Mean absolute camera position error (x,y,x) (m) | 0.165, 0.167, 0.272 | 0.597, 2.205, 65.441 |
| Mean camera position standard deviation (x,y,z) σ | 0.052, 0.059, 0.067 | 0.020, 0.018, 0.014 |
| Number of points in dense point cloud | 21,765,551 | 116,831,423 |
| Number of GCP | RMSE X (cm) | RMSE Y (cm) | RMSE Z (cm) | RMSE XY (cm) | Total RMSE (cm) |
|---|---|---|---|---|---|
| 7 | 7.02742 | 4.46724 | 0.705093 | 8.32712 | 8.35692 |
| Camera | F (pix) | Cx (pix) | Cy (pix) | K1 | K2 | K3 | P1 | P2 |
|---|---|---|---|---|---|---|---|---|
| F220 | 2808.897 | 1956.756 | 1498.347 | 0.040 | −0.128 | 0.118 | 0.000 | 0.000 |
| σ | 0.415 | 0.089 | 0.082 | 0 | 0 | 0 | 0 | 0 |
| L10 | 4256 | 2691.02 | 1803.22 | −0.0182 | −0.0168 | 0.0125 | −0.00236 | −0.00139 |
| σ | 0.401 | 0.13 | 0.063 | 0.000034 | 0.00013 | 0.00015 | 0.0000024 | 0.0000023 |
| Campaign | Coefficient | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|---|
| 2018 | k | 6 | 6 | 6 | 6 | ||
| α | 1 | 1 | 1 | 1 | |||
| 2019 | k | 6 | 6 | 6 | 6 | 6 | 6 |
| α | 1 | 1 | 1 | 1 | 1 | 1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Burdziakowski, P.; Specht, C.; Dabrowski, P.S.; Specht, M.; Lewicka, O.; Makar, A. Using UAV Photogrammetry to Analyse Changes in the Coastal Zone Based on the Sopot Tombolo (Salient) Measurement Project. Sensors 2020, 20, 4000. https://0-doi-org.brum.beds.ac.uk/10.3390/s20144000
Burdziakowski P, Specht C, Dabrowski PS, Specht M, Lewicka O, Makar A. Using UAV Photogrammetry to Analyse Changes in the Coastal Zone Based on the Sopot Tombolo (Salient) Measurement Project. Sensors. 2020; 20(14):4000. https://0-doi-org.brum.beds.ac.uk/10.3390/s20144000
Chicago/Turabian StyleBurdziakowski, Pawel, Cezary Specht, Pawel S. Dabrowski, Mariusz Specht, Oktawia Lewicka, and Artur Makar. 2020. "Using UAV Photogrammetry to Analyse Changes in the Coastal Zone Based on the Sopot Tombolo (Salient) Measurement Project" Sensors 20, no. 14: 4000. https://0-doi-org.brum.beds.ac.uk/10.3390/s20144000