Development and Implementation of a Hybrid Wireless Sensor Network of Low Power and Long Range for Urban Environments

 , , , and
, , , and
Abstract
:1. Introduction
2. Lora Technology
2.1. Overview
- Class A: The transmitting node remains in silent mode, while listening to possible configuration signals (coming through a gateway). It has two short reception windows, i.e., two offset times, and a configurable data rate. Transmissions from the server, or downlink (DL), are only permitted when communications from end-devices to the LoRa Network Server (LNS) through any gateway, known as uplink (UL), are successful. The concentrator node can respond only in one of the two reception slots. This is the type of device consuming the least energy.
- Class B: They use synchronization periods, called beacons, issued by the gateway. Therefore, this class is similar to A but also opens extra reception windows at scheduled times for DL messages from the server. This class is intended for applications requiring higher download data traffic (higher DL than above).
- Class C: Devices are always in silent mode, except when a sensor detects an event that has to be transmitted, so it is the class of device with the highest energy consumption. This allows planning for more reception windows (apart from the two standard slots present in all the classes) without prioritizing the success of UL communications. A trade-off occurs: more data can be transferred per unit of time, but at the cost of more consumption. So, the use of this class can be associated with continuity and consumption.
- Transmission power is limited to 25 mW (14 dBm) for UL messages, i.e., The consumption equivalent to one light-emitting diode (LED). For messages traveling from applications to end-devices (DL), transmission is allowed up to half a watt (27 dBm).
- Duty cycle depends on the channel used and for transmission time of a node, and its value is between 0.1 and 1.
- Maximum gain allowed for an antenna is +2.5 dBi.
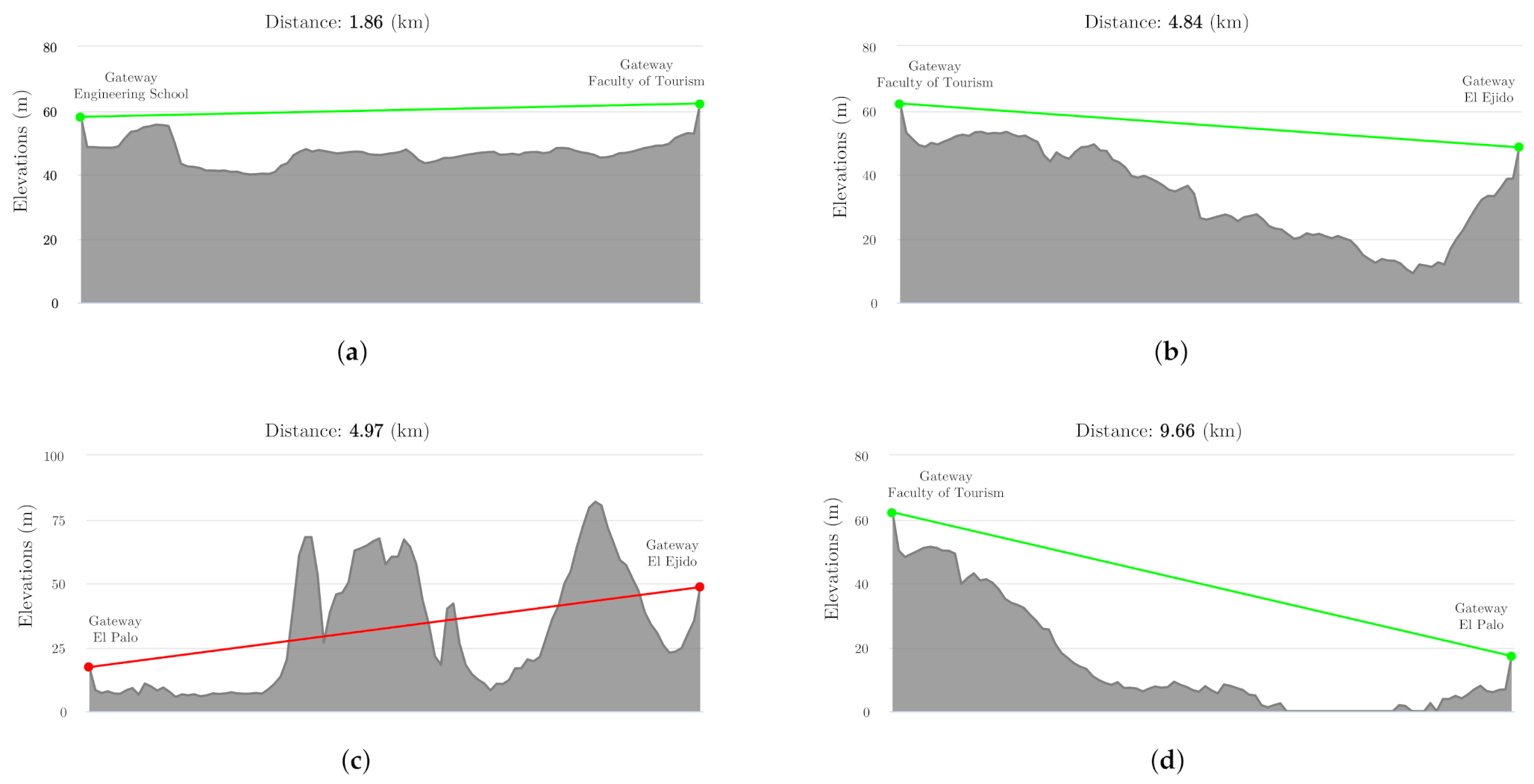
- The line of sight (LoS) between transmitting and receiving antennas: the waves propagate, with the information acquired by the sensors, through the free space (medium). The presence of obstacles in the path of the messages weakens the intensity of the carrier signal [26], which is why it is important to take into account the Fresnel zones (ellipsoid-shaped volume of revolution covering the distance between the antennas). The offset between the waves contained in this volume must always be less than 180. The center of the Fresnel zone is located in the middle of the distance between the end-device and the concentrator node. The reflection of the waves on obstacles, such as the ground (always present) can cause some of them to lag behind others. Thus, the gateways will receive waves directly but also from reflections. For this reason, the antennas should be placed outdoors and at height (the more the better). In addition, the antennas must be kept in a vertical position, being convenient that they are omnidirectional. The strength of the received signal is reduced as a result of the waves arriving out of phase with respect to those arriving directly. The next equation is used to quantify the losses (in dB) through the free space [62,63].where
- : Free space path loss, which quantifies the attenuation (in dB) of radio energy between transmitter node and gateways.
- D: Distance between transmitting (end-device) and receiving (gateway) antennas, in kilometers.
- f: Frequency in MHz.
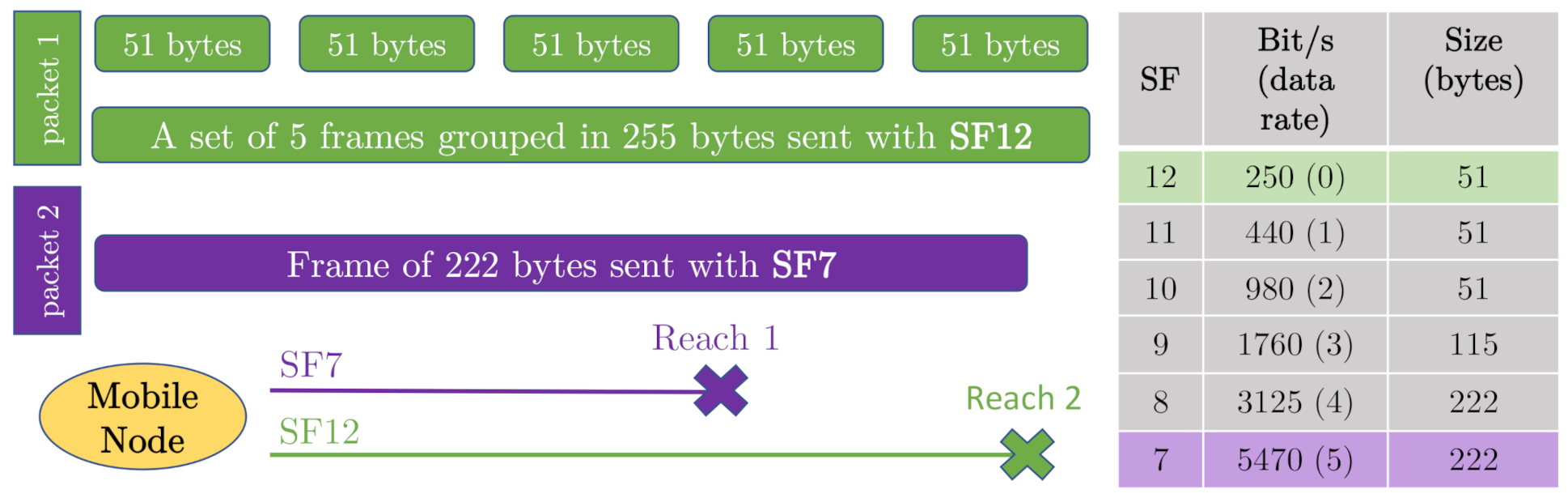
- The Spread Factor (SF) is a redundancy factor programmed in the transmitter node. LoRa is configurable, which allows establishing communication strategies. The SF parameter allows us to widen the frequency spectrum, to a greater or lesser extent, using a certain number of bits that encode a symbol. The higher the number of bits, the lower the transfer rate and the greater the probability of receiving the messages [64], since they are more immune to the interference of the band. Spread bits vary between 7 and 12, and the less they are used, the less power the transmitter consumes.
- The length of the message has a significant influence on the transmission distance, so it is necessary to decide what information is really useful before programming the dataframes. It should also be noted that LoRa uses an error detection algorithm, known as Cyclic Redundancy Check (CRC), adding control bits to ensure that the message is received correctly [65]. So the message can be limited only up to a point.
3. Description of the System Based on a Hybrid Network of Concentrator Nodes
3.1. Overview
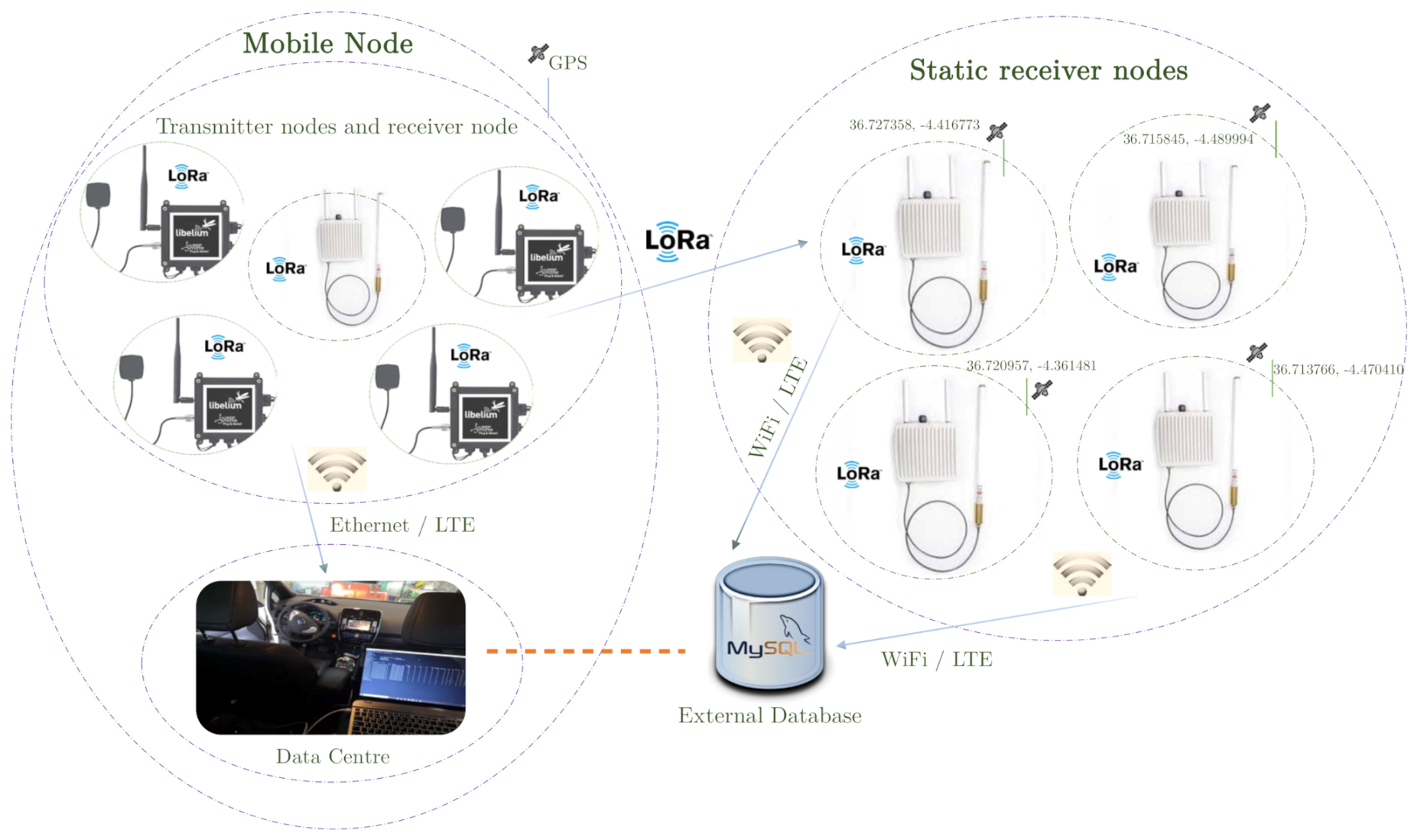
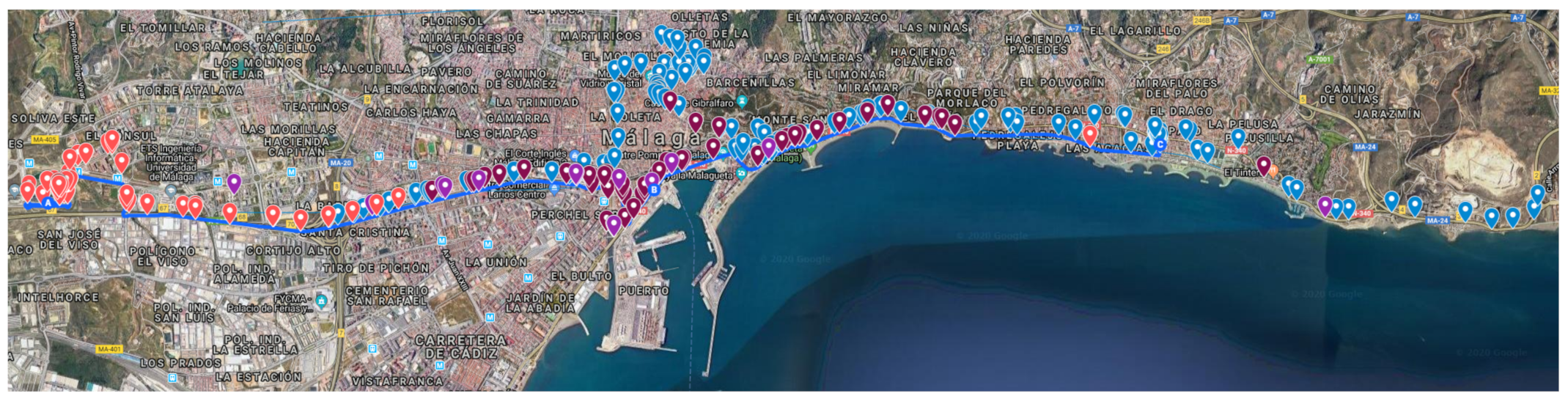
- On the one hand, the system architecture is based on fixed and mobile gateways, so that the number of lost packets by the concentrator nodes external to the mobile node can be counted, thus analyzing the different possible configurations of LoRa, as a parameterizable technology. The gateway onboard the vehicle permits to obtain all the dataframes which could not be captured by the static ones. After that, it is possible to establish the zones in the city with better coverage. This way, it is intended to arrange the static gateways up around the city in a useful serving way.
- On the other hand, a previous work provided a working solution to the problem in the same city [68]. That work, based on Zigbee technology, is used as a baseline to compare results and to verify any improvements of using LoRa in this scenario. For this purpose, the vehicle has followed the same route that in [68].
3.2. System Architecture and Implementation
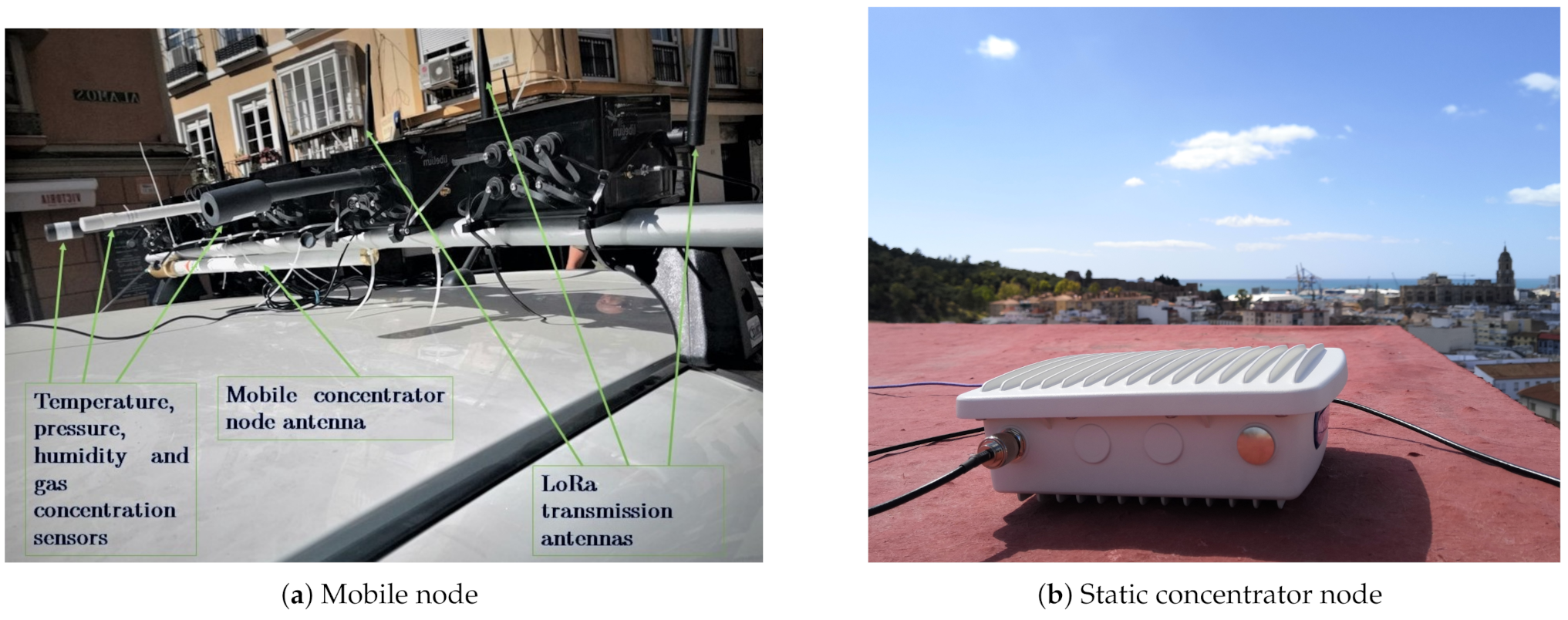
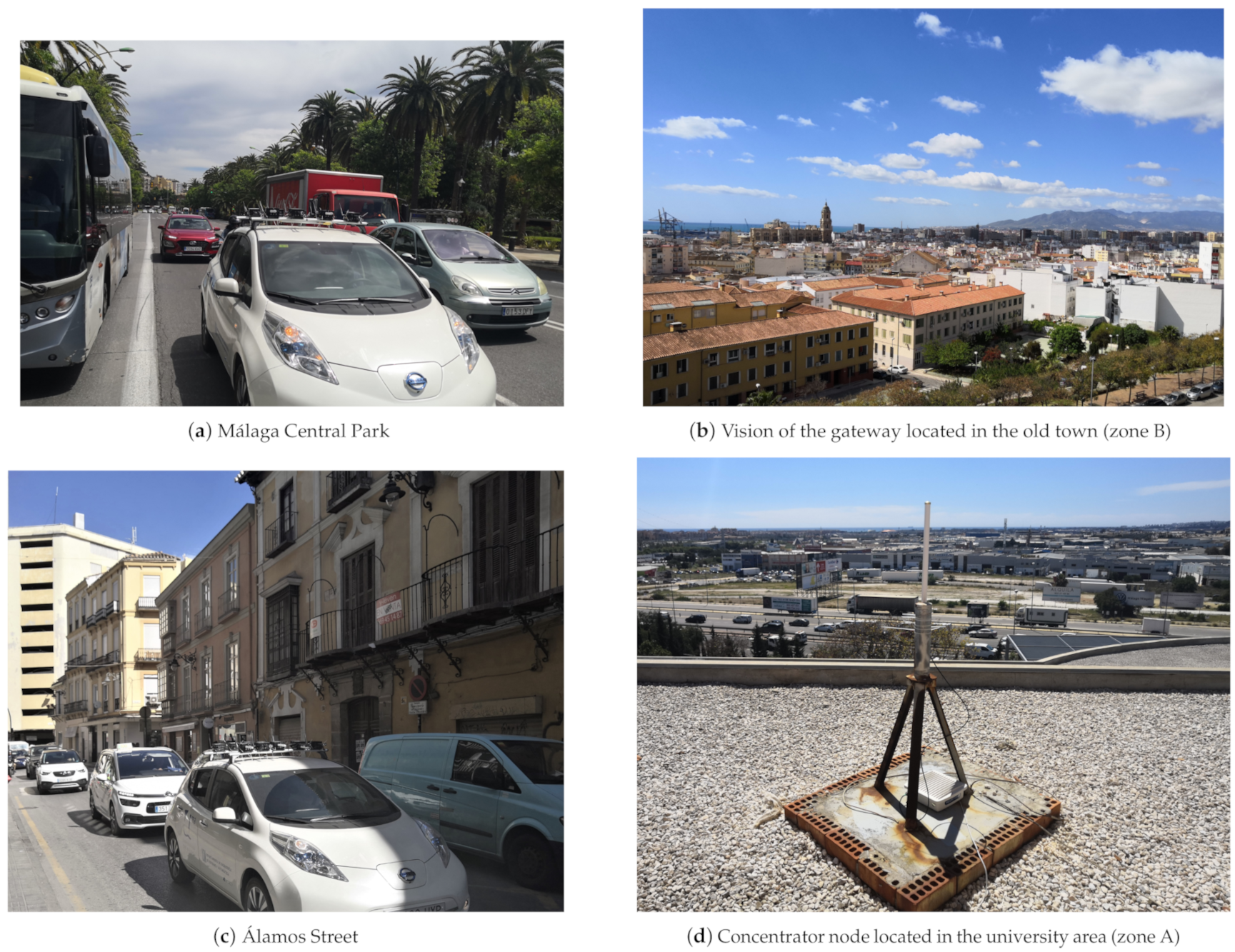
- A mobile node, equipped with a gateway and several wireless sensor modules. This gateway, being at a short distance from the transmitting nodes, guarantees the reception of all transmitted packets, except those that collide because they use the same channel at the same moment. It is worth noting that in each sensor module there can be a single probe or more than one, so the same transmitter node can send more than one magnitude in its own dataframe, associated with its unique identifier.
- An external network of concentrator nodes (gateways) located in fixed locations in the city in order to cover the largest possible area, and thus be able to analyze the range of the LoRa packets in an urban environment.
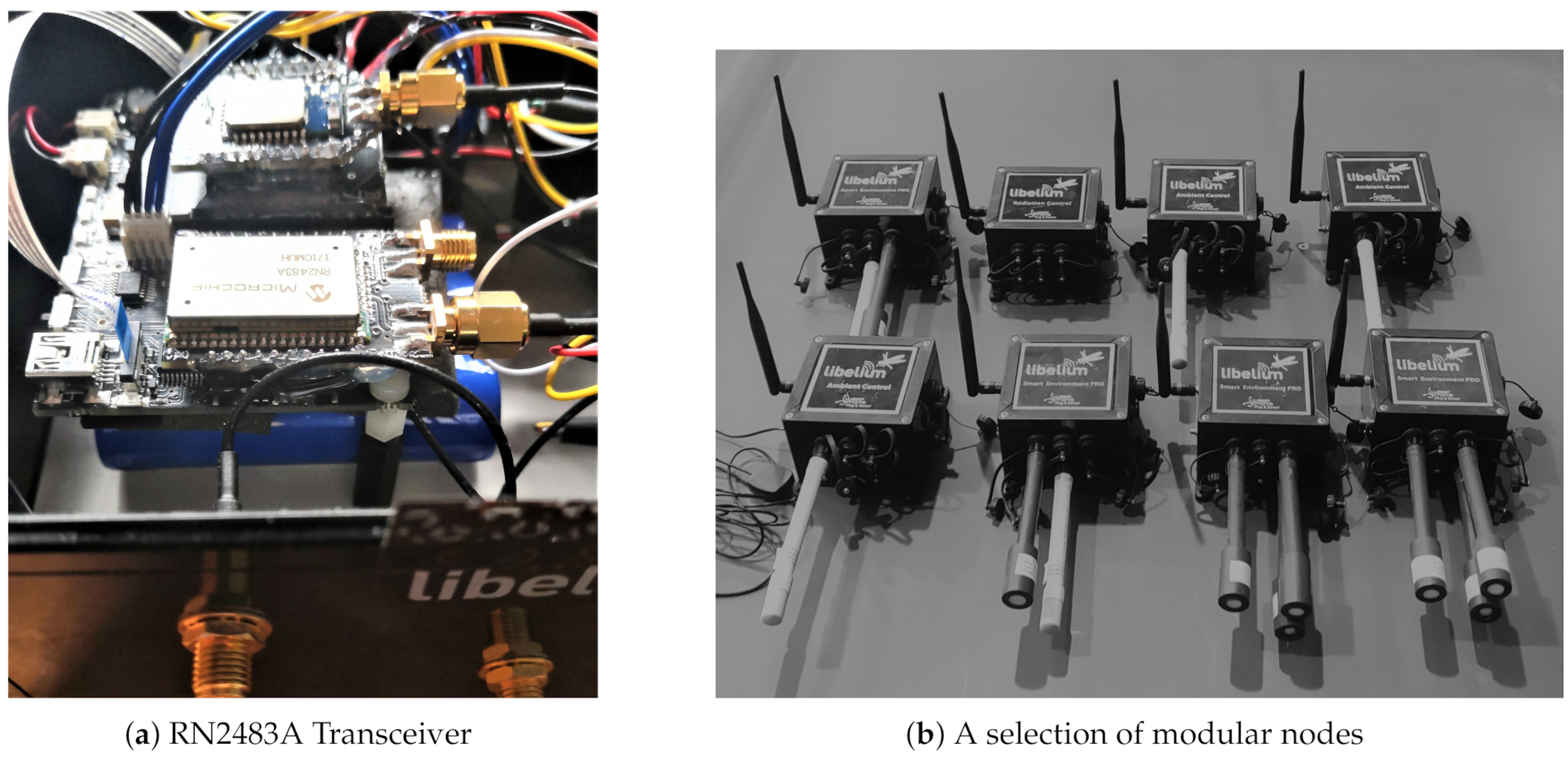
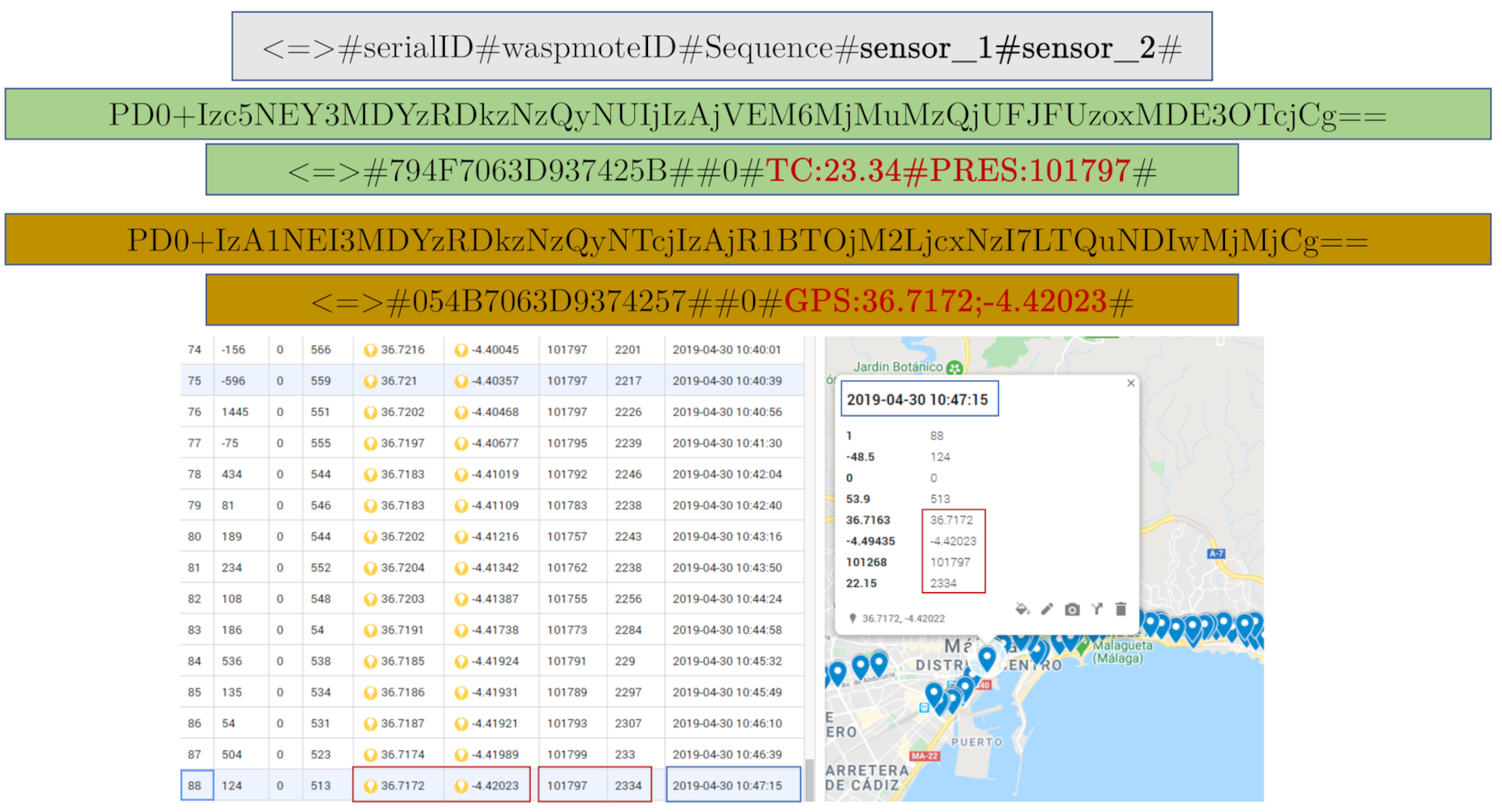
- Waspmote Plug Sense! Ambient Control LoRaWAN EU (GPS-ready). This module is capable of measuring the main environmental variables, admitting up to three types of probe: the 9370-P, capable of measuring temperature, pressure and humidity; the 9205-P and 9325-P, capable of measuring brightness values. The dynamics of these sensors are relatively fast, so they do not considerably influence the speed of transmission.
- Waspmote Plug Sense! Smart Environment PRO LoRaWAN EU (GPS-ready) This node allows to measure the concentration of various gases in the air of cities, such as , , and , and can also measure temperature, pressure, humidity and luminosity.
- Waspmote Plug Sense! Radiation Control LoRaWAN EU (GPS-ready). It is capable of measuring radiation values using a Geiger sensor, but can also be used as a GPS module, configuring it to act as a GPS node, without measuring any other magnitude. This way, it emits frames of approximately 50 bytes with the latitude and longitude values of the mobile node, in ASCII.
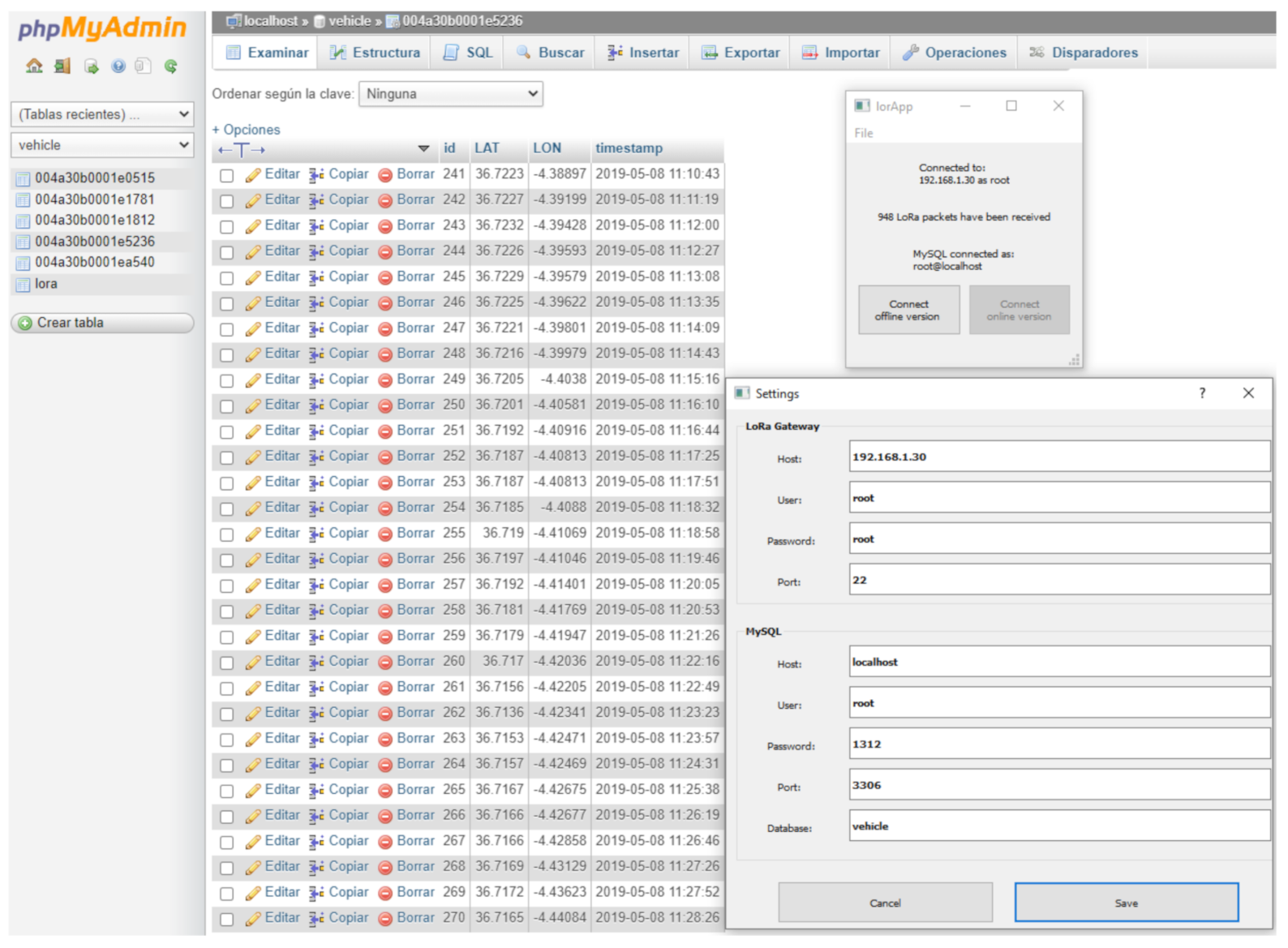
- Indicate the concentrator node from which the data are extracted, using IP, user, password and port (SSH protocol).
- Access the database, indicating the IP, user, password, port and name of the database where the downloaded data are dumped.
3.3. Activation Modes
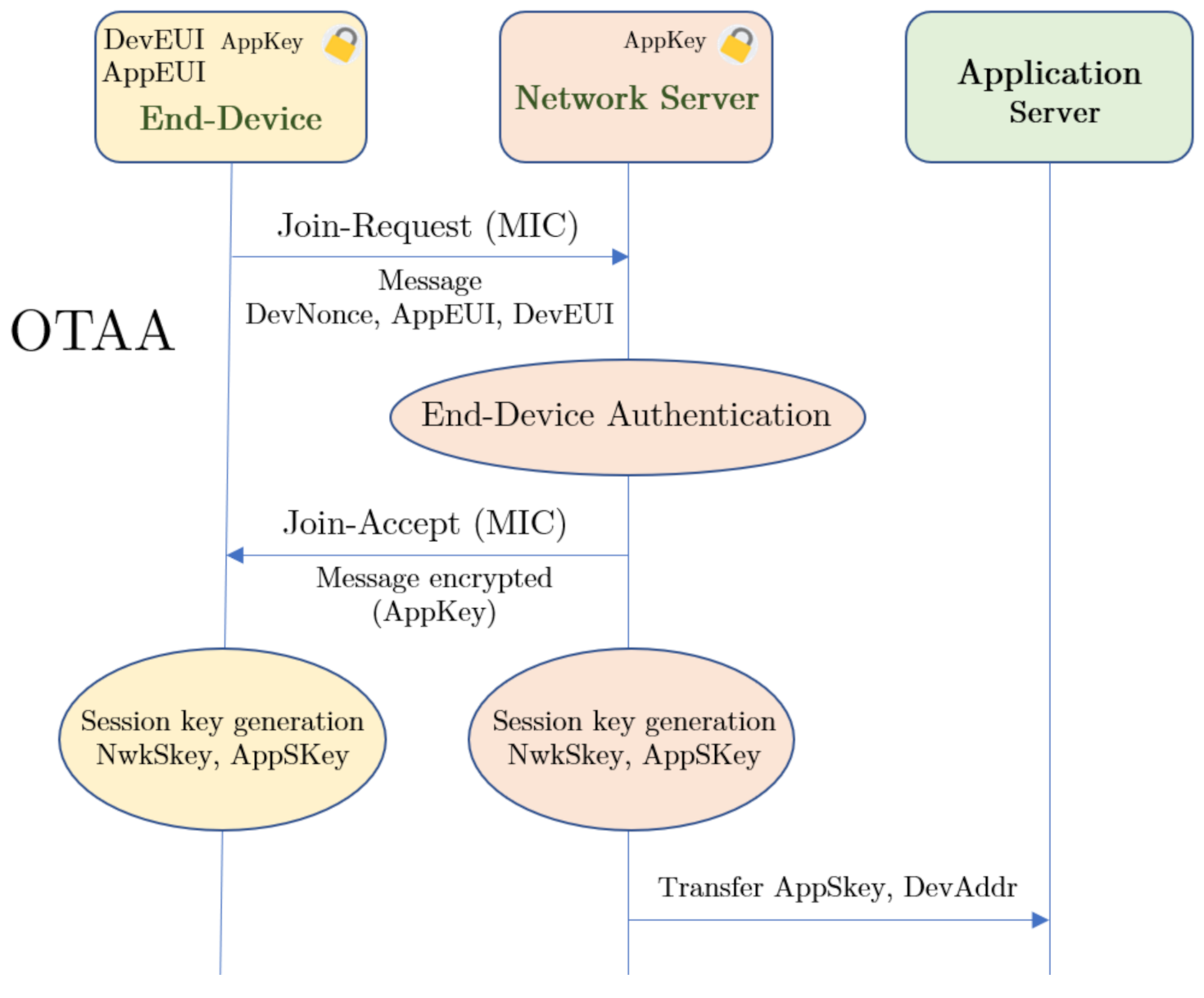
3.3.1. Over the Air Activation
- The Device Extended Unique Identifier (DevEUI), which identifies only the end-device (sensor node) and is similar to a MAC address, i.e., its fingerprint, which is registered in the device’s ROM. However, a DevEUI can always be assigned by modifying the value loaded by the operating system into the RAM, which is useful for privacy issues. This identifier consists of 64 bits.
- The Application Identifier (AppEUI), also 64 bits long, is analogous to an application port, through which the application server is accessed.
- The Application Key (Appkey) is a unique Advanced Encryption Standard (AES) 128-bit symmetric key, which must be stored in the network server and in the transmitter so that they can establish the join procedure. This secret key is known only by the end-device and the application with which it communicates, and it is used to determine the two session keys during the activation.
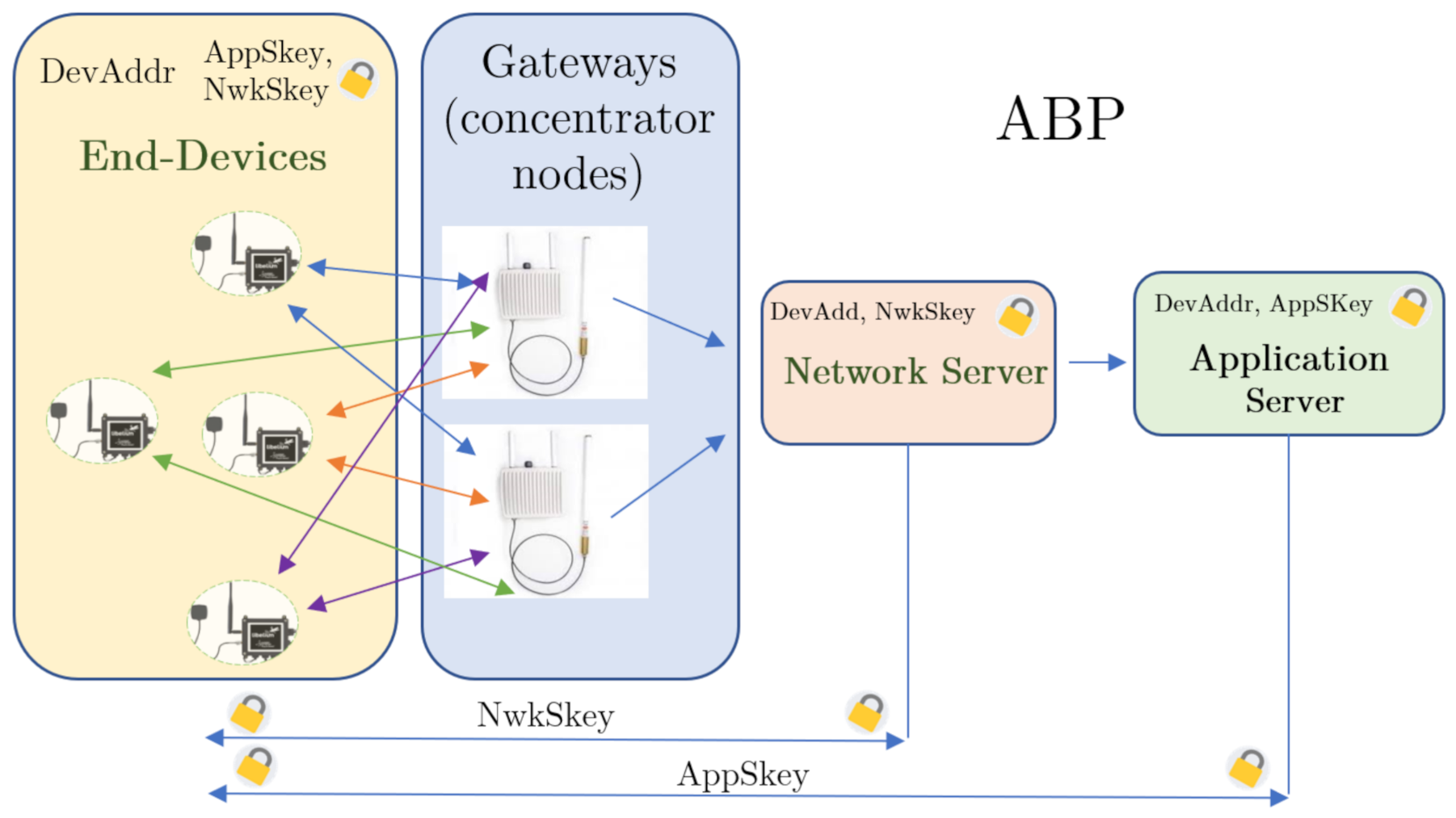
3.3.2. Activation by Personalization
- In the network layer, the message integrity is established by the MIC, making use of the NwkSkey in order to encrypt the payload from end-devices to the network server.
- In the application layer, the payload is encrypted using the AppSkey so that the payload is encrypted from end-devices to the application server.
3.4. Operating Modes of the System
- Offline mode. The information is taken in plain text files that are interpreted and grouped in files of type .CSV, for further treatment. The data are stored in the laptop computer (control station embarked on the car) through a developed portable GUI, from which they can be uploaded to the external database as soon as the Internet is available. The advantage is that it is not necessary to have an access point to the Internet in order to collect information, since the analysis and processing of the data will be done when the period of experimentation is over. This mode is therefore suitable for networks whose deployment has a limited duration (several days or weeks) and in which the processing of the data does not need to be done in real-time. This is possible because the packet forwarders have an MQTT server installed onto them, which subscribes to the topics published by the sensor nodes.
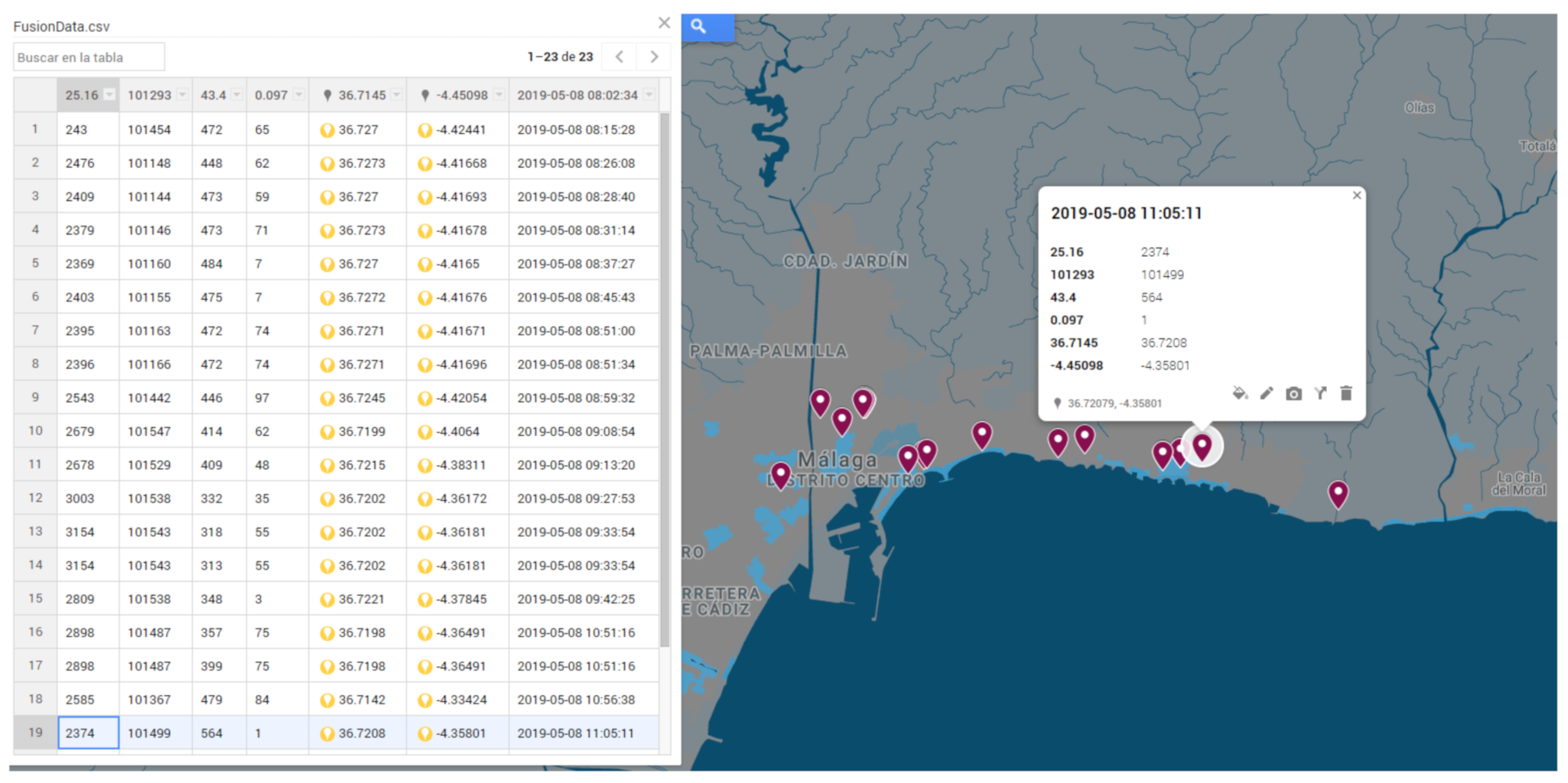
- Online mode. The principle is the same, but now each gateway is connected to an Internet access point (through a 4G SIM card or a router), so that, in real-time, they dump received data into the external database and, in turn, into a web server with Google Maps services. In this way, it is possible to view the data collected in the frames, with their geo-location, as shown in the experiments.
3.5. Mobile Node
- To compare the data packets received by the mobile gateway to those taken by the external static gateway network. In this way, it is possible to establish which zones of the city are white, which means that they are not covered by the mobile node, nor by the static concentrator nodes located at high points around the city.
- To listen to data packets from sensors embarked on the vehicle to compare the range and to count the dataframes acquired by the LoRa gateway with respect to the Zigbee gateway used in [68], since both of them have been driven along the same route. In addition, this allows us to analyze the behavior of a LoRa gateway in motion, at normal urban traffic speeds.
4. Experiments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, C.; Patras, P.; Haddadi, H. Deep learning in mobile and wireless networking: A survey. IEEE Commun. Surv. Tutor. 2019, 21, 2224–2287. [Google Scholar]
- Kibaroglu, K.; Sayginer, M.; Rebeiz, G.M. A scalable 64-element 28 GHz phased-array transceiver with 50 dBm EIRP and 8–12 Gbps 5G link at 300 m without any calibration. In Proceedings of the 2018 IEEE/MTT-S International Microwave Symposium-IMS, Philadelphia, PA, USA, 10–15 June 2018; pp. 496–498. [Google Scholar]
- Morgado, A.; Huq, K.M.S.; Mumtaz, S.; Rodriguez, J. A survey of 5G technologies: Regulatory, standardization and industrial perspectives. Digit. Commun. Netw. 2018, 4, 87–97. [Google Scholar]
- Khurpade, J.M.; Rao, D.; Sanghavi, P.D. A survey on IOT and 5G network. In Proceedings of the 2018 International Conference on Smart City and Emerging Technology (ICSCET), Mumbai, India, 5 January 2018; pp. 1–3. [Google Scholar]
- Kiss, P.; Reale, A.; Ferrari, C.J.; Istenes, Z. Deployment of IoT applications on 5G edge. In Proceedings of the 2018 IEEE International Conference on Future IoT Technologies (Future IoT), Eger, Hungary, 18–19 January 2018; pp. 1–9. [Google Scholar]
- Zhang, H.; Liu, N.; Chu, X.; Long, K.; Aghvami, A.H.; Leung, V.C. Network slicing based 5G and future mobile networks: Mobility, resource management, and challenges. IEEE Commun. Mag. 2017, 55, 138–145. [Google Scholar]
- Yu, H.; Doylend, J.; Lin, W.; Nguyen, K.; Liu, W.; Gold, D.; Dahal, A.; Jan, C.; Herrick, R.; Ghiurcan, G.A.; et al. 100Gbps CWDM4 silicon photonics transmitter for 5G applications. In Proceedings of the Optical Fiber Communication Conference, San Diego, CA, USA, 3–7 March 2019. [Google Scholar]
- Sakaguchi, K.; Haustein, T.; Barbarossa, S.; Strinati, E.C.; Clemente, A.; Destino, G.; Pärssinen, A.; Kim, I.; Chung, H.; Kim, J.; et al. Where, when, and how mmWave is used in 5G and beyond. IEICE Trans. Electron. 2017, 100, 790–808. [Google Scholar]
- Sharma, V.; Srinivasan, K.; Chao, H.C.; Hua, K.L.; Cheng, W.H. Intelligent deployment of UAVs in 5G heterogeneous communication environment for improved coverage. J. Netw. Comput. Appl. 2017, 85, 94–105. [Google Scholar]
- Dao, N.N.; Park, M.; Kim, J.; Paek, J.; Cho, S. Resource-aware relay selection for inter-cell interference avoidance in 5G heterogeneous network for Internet of Things systems. Future Gener. Comput. Syst. 2019, 93, 877–887. [Google Scholar]
- Esswie, A.A.; Pedersen, K.I. Opportunistic spatial preemptive scheduling for URLLC and eMBB coexistence in multi-user 5G networks. IEEE Access 2018, 6, 38451–38463. [Google Scholar]
- Siddiqi, M.A.; Yu, H.; Joung, J. 5G Ultra-Reliable Low-Latency Communication Implementation Challenges and Operational Issues with IoT Devices. Electronics 2019, 8, 981. [Google Scholar]
- Lacy, A.; Bravo, R.; Otero-Piñeiro, A.; Pena, R.; De Lacy, F.; Menchaca, R.; Balibrea, J. 5G-assisted telementored surgery. Br. J. Surg. 2019, 106, 1576–1579. [Google Scholar] [PubMed] [Green Version]
- Thomas, M.; Edwards, R.; Wang, Z. In Proceedings of the Consideration of IEEE 802. 11 p and proposed 5G for Holograms in Vehicular Communication, London, UK, 9–13 April 2018. [Google Scholar]
- Zhai, W. Design of narrowband-IoT oriented wireless sensor network in urban smart parking. Int. J. Online Biomed. Eng. (IJOE) 2017, 13, 116–126. [Google Scholar]
- Barriga, J.J.; Sulca, J.; León, J.L.; Ulloa, A.; Portero, D.; Andrade, R.; Yoo, S.G. Smart Parking: A Literature Review from the Technological Perspective. Appl. Sci. 2019, 9, 4569. [Google Scholar] [CrossRef] [Green Version]
- Kim, D.Y.; Kim, S.; Park, J.H. A combined network control approach for the edge cloud and LPWAN-based IoT services. Concurr. Comput. Pract. Exp. 2020, 32, e4406. [Google Scholar] [CrossRef]
- Strinati, E.C.; Barbarossa, S.; Gonzalez-Jimenez, J.L.; Ktenas, D.; Cassiau, N.; Maret, L.; Dehos, C. 6G: The next frontier: From holographic messaging to artificial intelligence using subterahertz and visible light communication. IEEE Veh. Technol. Mag. 2019, 14, 42–50. [Google Scholar] [CrossRef]
- Mekki, K.; Bajic, E.; Chaxel, F.; Meyer, F. A comparative study of LPWAN technologies for large-scale IoT deployment. ICT Express 2019, 5, 1–7. [Google Scholar] [CrossRef]
- Santos, J.; Leroux, P.; Wauters, T.; Volckaert, B.; De Turck, F. Anomaly detection for smart city applications over 5g low power wide area networks. In Proceedings of the NOMS 2018—2018 IEEE/IFIP Network Operations and Management Symposium, Taipei, Taiwan, 23–27 April 2018; pp. 1–9. [Google Scholar]
- Neumann, P.; Montavont, J.; Noel, T. Indoor deployment of low-power wide area networks (LPWAN): A LoRaWAN case study. In Proceedings of the 2016 IEEE 12th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), New York, NY, USA, 17–19 October 2016; pp. 1–8. [Google Scholar]
- Navarro-Ortiz, J.; Sendra, S.; Ameigeiras, P.; Lopez-Soler, J.M. Integration of LoRaWAN and 4G/5G for the Industrial Internet of Things. IEEE Commun. Mag. 2018, 56, 60–67. [Google Scholar] [CrossRef]
- Böcker, S.; Arendt, C.; Jörke, P.; Wietfeld, C. LPWAN in the Context of 5G: Capability of LoRaWAN to Contribute to mMTC. In Proceedings of the 2019 IEEE 5th World Forum on Internet of Things (WF-IoT), Limerick, Ireland, 15–18 April 2019; pp. 737–742. [Google Scholar]
- Yasmin, R.; Petäjäjärvi, J.; Mikhaylov, K.; Pouttu, A. On the integration of LoRaWAN with the 5G test network. In Proceedings of the 2017 IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2017; pp. 1–6. [Google Scholar]
- Alsulami, M.M.; Akkari, N. The role of 5G wireless networks in the internet-of-things (IoT). In Proceedings of the 2018 1st International Conference on Computer Applications & Information Security (ICCAIS), Riyadh, Saudi Arabia, 4–6 April 2018; pp. 1–8. [Google Scholar]
- Adelantado, F.; Vilajosana, X.; Tuset-Peiro, P.; Martinez, B.; Melia-Segui, J.; Watteyne, T. Understanding the limits of LoRaWAN. IEEE Commun. Mag. 2017, 55, 34–40. [Google Scholar] [CrossRef] [Green Version]
- Naranjo, P.G.V.; Pooranian, Z.; Shojafar, M.; Conti, M.; Buyya, R. FOCAN: A Fog-supported smart city network architecture for management of applications in the Internet of Everything environments. J. Parallel Distrib. Comput. 2019, 132, 274–283. [Google Scholar] [CrossRef] [Green Version]
- Mohapatra, S.; Parija, S. A Brief Understanding of IOT Health Care Service Model Over Remotely Cloud Connected Environment. In Advances in Intelligent Computing and Communication; Springer: Berlin/Heidelberg, Germany, 2020; pp. 46–51. [Google Scholar]
- Yadav, E.P.; Mittal, E.A.; Yadav, H. IoT: Challenges and issues in Indian perspective. In Proceedings of the 2018 3rd International Conference On Internet of Things: Smart Innovation and Usages (IoT-SIU), Bhimtal, India, 23–24 February 2018; pp. 1–5. [Google Scholar]
- Chatterjee, S. Influence of IoT Policy on Quality of Life: From Government and Citizens’ Perspectives. Int. J. Electron. Gov. Res. (IJEGR) 2019, 15, 19–38. [Google Scholar] [CrossRef]
- Devi, M.S.; Rahamathulla, V. Air Quality Through IoT and Big Data Analytics. In Advances in Data Science and Management; Springer: Berlin/Heidelberg, Germany, 2020; pp. 181–187. [Google Scholar]
- Rashid, B.; Rehmani, M.H. Applications of wireless sensor networks for urban areas: A survey. J. Netw. Comput. Appl. 2016, 60, 192–219. [Google Scholar] [CrossRef]
- Vejlgaard, B.; Lauridsen, M.; Nguyen, H.; Kovács, I.Z.; Mogensen, P.; Sorensen, M. Interference impact on coverage and capacity for low power wide area IoT networks. In Proceedings of the 2017 IEEE Wireless Communications and Networking Conference (WCNC), San Francisco, CA, USA, 19–22 March 2017; pp. 1–6. [Google Scholar]
- Markkula, J.; Mikhaylov, K.; Haapola, J. Simulating LoRaWAN: On importance of inter spreading factor interference and collision effect. In Proceedings of the ICC 2019—2019 IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019; pp. 1–7. [Google Scholar]
- Gupta, V.; Devar, S.K.; Kumar, N.H.; Bagadi, K.P. Modelling of IoT traffic and its impact on LoRaWAN. In Proceedings of the GLOBECOM 2017—2017 IEEE Global Communications Conference, Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar]
- Farhad, A.; Kim, D.H.; Sthapit, P.; Pyun, J.Y. Interference-Aware Spreading Factor Assignment Scheme for the Massive LoRaWAN Network. In Proceedings of the 2019 International Conference on Electronics, Information, and Communication (ICEIC), Auckland, New Zealand, 22–25 January 2019; pp. 1–2. [Google Scholar]
- Stoynov, V.R.; Poulkov, V.K.; Valkova-Jarvis, Z.V. Interference Management in LoRaWANs—Overview and Simulation Study. In Proceedings of the 2018 Advances in Wireless and Optical Communications (RTUWO), Riga, Latvia, 15–16 November 2018; pp. 251–256. [Google Scholar]
- Abdelfadeel, K.Q.; Zorbas, D.; Cionca, V.; Pesch, D. Free-fine-grained scheduling for reliable and energy efficient data collection in lorawan. IEEE Internet Things J. 2019, 7, 669–683. [Google Scholar] [CrossRef] [Green Version]
- Aernouts, M.; Berkvens, R.; Van Vlaenderen, K.; Weyn, M. Sigfox and LoRaWAN datasets for fingerprint localization in large urban and rural areas. Data 2018, 3, 13. [Google Scholar] [CrossRef] [Green Version]
- Fargas, B.C.; Petersen, M.N. GPS-free geolocation using LoRa in low-power WANs. In Proceedings of the 2017 Global Internet of Things Summit (Giots), Geneva, Switzerland, 6–9 June 2017; pp. 1–6. [Google Scholar]
- Hattarge, S.; Kekre, A.; Kothari, A. LoRaWAN based GPS tracking of city-buses for smart public transport system. In Proceedings of the 2018 First International Conference on Secure Cyber Computing and Communication (ICSCCC), Jalandhar, India, 15–17 December 2018; pp. 265–269. [Google Scholar]
- Chen, M.; Miao, Y.; Jian, X.; Wang, X.; Humar, I. Cognitive-LPWAN: Towards intelligent wireless services in hybrid low power wide area networks. IEEE Trans. Green Commun. Netw. 2018, 3, 409–417. [Google Scholar] [CrossRef] [Green Version]
- Zhu, G.; Liu, D.; Du, Y.; You, C.; Zhang, J.; Huang, K. Toward an Intelligent Edge: Wireless Communication Meets Machine Learning. IEEE Commun. Mag. 2020, 58, 19–25. [Google Scholar] [CrossRef] [Green Version]
- Vales-Alonso, J.; Parrado-García, F.J.; López-Matencio, P.; Alcaraz, J.J.; González-Castaño, F.J. On the optimal random deployment of wireless sensor networks in non-homogeneous scenarios. Ad Hoc Netw. 2013, 11, 846–860. [Google Scholar] [CrossRef]
- Matni, N.; Moraes, J.; Oliveira, H.; Rosário, D.; Cerqueira, E. LoRaWAN Gateway Placement Model for Dynamic Internet of Things Scenarios. Sensors 2020, 20, 4336. [Google Scholar] [CrossRef]
- Agarwal, Y.; Jain, K.; Karabasoglu, O. Smart vehicle monitoring and assistance using cloud computing in vehicular Ad Hoc networks. Int. J. Transp. Sci. Technol. 2018, 7, 60–73. [Google Scholar] [CrossRef]
- AL-Dhief, F.T.; Sabri, N.; Fouad, S.; Latiff, N.A.; Albader, M.A.A. A review of forest fire surveillance technologies: Mobile ad-hoc network routing protocols perspective. J. King Saud-Univ.-Comput. Inf. Sci. 2019, 31, 135–146. [Google Scholar] [CrossRef]
- Lai, Y.; Yang, F.; Su, J.; Zhou, Q.; Wang, T.; Zhang, L.; Xu, Y. Fog-based two-phase event monitoring and data gathering in vehicular sensor networks. Sensors 2018, 18, 82. [Google Scholar] [CrossRef] [Green Version]
- Marjovi, A.; Arfire, A.; Martinoli, A. High resolution air pollution maps in urban environments using mobile sensor networks. In Proceedings of the 2015 International Conference on Distributed Computing in Sensor Systems, Fortaleza, Brazil, 10–12 June 2015; pp. 11–20. [Google Scholar]
- Xu, Y.; Chen, X.; Liu, A.; Hu, C. A latency and coverage optimized data collection scheme for smart cities based on vehicular ad-hoc networks. Sensors 2017, 17, 888. [Google Scholar] [CrossRef] [Green Version]
- Martinez-Caro, J.M.; Cano, M.D. IoT System Integrating Unmanned Aerial Vehicles and LoRa Technology: A Performance Evaluation Study. Wirel. Commun. Mob. Comput. 2019, 2019, 4307925. [Google Scholar] [CrossRef]
- Khan, M.A.; Qureshi, I.M.; Khanzada, F. A hybrid communication scheme for efficient and low-cost deployment of future flying ad-hoc network (FANET). Drones 2019, 3, 16. [Google Scholar] [CrossRef] [Green Version]
- Basford, P.J.; Bulot, F.M.; Apetroaie-Cristea, M.; Cox, S.J.; Ossont, S.J. LoRaWAN for smart city IoT deployments: A long term evaluation. Sensors 2020, 20, 648. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hosseinzadeh, S.; Ramzan, N.; Yousefi, M.; Curtis, K.; Larijani, H. Impact of Spreading Factor on LoRaWAN Propagation in a Metropolitan Environment. In Proceedings of the 2020 International Conference on UK-China Emerging Technologies (UCET), Glasgow, UK, 20–21 August 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Khan, A.W.; Abdullah, A.H.; Anisi, M.H.; Bangash, J.I. A comprehensive study of data collection schemes using mobile sinks in wireless sensor networks. Sensors 2014, 14, 2510–2548. [Google Scholar] [CrossRef] [PubMed]
- Tuna, G.; Gungor, V.C.; Gulez, K. An autonomous wireless sensor network deployment system using mobile robots for human existence detection in case of disasters. Ad Hoc Netw. 2014, 13, 54–68. [Google Scholar] [CrossRef]
- Boussoufa-Lahlah, S.; Semchedine, F.; Bouallouche-Medjkoune, L. Geographic routing protocols for Vehicular Ad hoc NETworks (VANETs): A survey. Veh. Commun. 2018, 11, 20–31. [Google Scholar] [CrossRef]
- Mohamed, S.M.; Hamza, H.S.; Saroit, I.A. Coverage in mobile wireless sensor networks (M-WSN): A survey. Comput. Commun. 2017, 110, 133–150. [Google Scholar] [CrossRef]
- Mroue, H.; Parrein, B.; Hamrioui, S.; Bakowski, P.; Nasser, A.; Cruz, E.M.; Vince, W. LoRa+: An extension of LoRaWAN protocol to reduce infrastructure costs by improving the Quality of Service. Internet Things 2020, 9, 100176. [Google Scholar] [CrossRef]
- Sørensen, R.B.; Kim, D.M.; Nielsen, J.J.; Popovski, P. Analysis of latency and MAC-layer performance for class a LoRaWAN. IEEE Wirel. Commun. Lett. 2017, 6, 566–569. [Google Scholar] [CrossRef] [Green Version]
- Haxhibeqiri, J.; De Poorter, E.; Moerman, I.; Hoebeke, J. A survey of LoRaWAN for IoT: From technology to application. Sensors 2018, 18, 3995. [Google Scholar] [CrossRef] [Green Version]
- Harinda, E.; Hosseinzadeh, S.; Larijani, H.; Gibson, R.M. Comparative Performance Analysis of Empirical Propagation Models for LoRaWAN 868MHz in an Urban Scenario. In Proceedings of the 2019 IEEE 5th World Forum on Internet of Things (WF-IoT), Limerick, Ireland, 15–18 April 2019; pp. 154–159. [Google Scholar]
- Linka, H.; Rademacher, M.; Aliu, O.G.; Jonas, K. Path Loss Models for Low-Power Wide-Area Networks: Experimental Results Using Lora; Bonn-Rhein-Sieg University of Applied Sciences: Fraunhofer Fit, Sankt Augustin, Germany, 2018. [Google Scholar]
- Lavric, A.; Popa, V. Performance evaluation of LoRaWAN communication scalability in large-scale wireless sensor networks. Wirel. Commun. Mob. Comput. 2018, 2018, 6730719. [Google Scholar] [CrossRef] [Green Version]
- Casals, L.; Mir, B.; Vidal, R.; Gomez, C. Modeling the energy performance of LoRaWAN. Sensors 2017, 17, 2364. [Google Scholar] [CrossRef] [Green Version]
- Jebril, A.H.; Sali, A.; Ismail, A.; Rasid, M.F.A. Overcoming limitations of LoRa physical layer in image transmission. Sensors 2018, 18, 3257. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bankov, D.; Khorov, E.; Lyakhov, A. On the limits of LoRaWAN channel access. In Proceedings of the 2016 International Conference on Engineering and Telecommunication (EnT), Moscow, Russia, 29–30 November 2016; pp. 10–14. [Google Scholar]
- Socarrás Bertiz, C.A.; Fernández Lozano, J.J.; Gomez-Ruiz, J.A.; García-Cerezo, A. Integration of a Mobile Node into a Hybrid Wireless Sensor Network for Urban Environments. Sensors 2019, 19, 215. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dönmez, T.C.; Nigussie, E. Security of lorawan v1. 1 in backward compatibility scenarios. Procedia Comput. Sci. 2018, 134, 51–58. [Google Scholar] [CrossRef]
- Sung, W.J.; Ahn, H.G.; Kim, J.B.; Choi, S.G. Protecting end-device from replay attack on LoRaWAN. In Proceedings of the 2018 20th International Conference on Advanced Communication Technology (ICACT), Korea, South, 11–14 February 2018; pp. 167–171. [Google Scholar]
- Yang, X.; Karampatzakis, E.; Doerr, C.; Kuipers, F. Security vulnerabilities in LoRaWAN. In Proceedings of the 2018 IEEE/ACM Third International Conference on Internet-of-Things Design and Implementation (IoTDI), Orlando, FL, USA, 17–20 April 2018; pp. 129–140. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| End-Device | Units | SF | Sent Bytes per Unit | Measurements | Other Parameters of Interest |
|---|---|---|---|---|---|
| Smart Environment PRO | 2 | 12 | 50 | , , , | RSSI, SNR, seqn, timestamp |
| Smart Environment PRO | 2 | 9 | 88 | , , , | |
| Ambient Control | 3 | 12 | 50 | Temperature, pressure. humidity and/or GPS | |
| Radiation Control | 1 | 12 | 50 | GPS |
| Net Addr | Dev EUI | Class | Joined | Seq Num | Up | Down | 1st | 2st | RSSI min | max | avg | SNR max | min | avg |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 00:00:10:01 | 00-4a-30-b0-00-1e-18-12 | A | 2019-04-29T16:56:47z | 801 | 16 | 16 | 8 | 8 | −114 | −52 | −91 | −15.8 | 10 | 2.8 |
| 00:00:10:02 | 00-4a-30-b0-00-1e-a5-40 | A | 2019-04-29T16:57:34z | 709 | 26 | 20 | 6 | 18 | −119 | −65 | −97 | −16.2 | 9.5 | 6.3 |
| 00:00:10:03 | 00-4a-30-b0-00-1e-17-81 | A | 2019-04-29T16:57:45z | 2152 | 30 | 29 | 11 | 18 | −121 | −57 | −88 | −14.8 | 11.7 | 7.7 |
| 00:00:10:04 | 00-4a-30-b0-00-1e-17-83 | A | 2019-04-29T16:57:55z | 659 | 12 | 10 | 4 | 6 | −121 | −59 | −95 | −17 | 13.3 | 5.8 |
| 00:00:10:05 | 00-4a-30-b0-00-1e-8a-09 | A | 2019-04-29T16:58:11z | 82 | 2 | 2 | 1 | 1 | −115 | −56 | −98 | −8.6 | 13.1 | 6.2 |
| 00:00:10:06 | 00-4a-30-b0-00-1e-52-36 | A | 2019-04-29T16:58:26z | 325 | 5 | 3 | 2 | 1 | −122 | −58 | −88 | −18 | 11.5 | 7.5 |
| Net Addr | Dev EUI | Class | Joined | Seq Num | Up | Down | 1st | 2st | RSSI min | max | avg | SNR max | min | avg |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 00:00:10:01 | 00-4a-30-b0-00-1e-18-12 | A | 2019-04-29T16:56:47z | 705 | 64 | 61 | 20 | 41 | −121 | −55 | −93 | −17.8 | 12 | 3.7 |
| 00:00:10:02 | 00-4a-30-b0-00-1e-a5-40 | A | 2019-04-29T16:57:34z | 722 | 80 | 77 | 35 | 42 | −120 | −67 | −95 | −18.2 | 11 | 4.6 |
| 00:00:10:03 | 00-4a-30-b0-00-1e-17-81 | A | 2019-04-29T16:57:45z | 2486 | 103 | 101 | 52 | 49 | −121 | −58 | −92 | −16.2 | 12.2 | 7.8 |
| 00:00:10:04 | 00-4a-30-b0-00-1e-17-83 | A | 2019-04-29T16:57:55z | 742 | 58 | 58 | 25 | 33 | −121 | −58 | −99 | −17 | 13.2 | 5.9 |
| 00:00:10:05 | 00-4a-30-b0-00-1e-8a-09 | A | 2019-04-29T16:58:11z | 91 | 18 | 14 | 10 | 4 | −119 | −55 | −97 | −8.5 | 13.5 | 6.8 |
| 00:00:10:06 | 00-4a-30-b0-00-1e-52-36 | A | 2019-04-29T16:58:26z | 285 | 14 | 9 | 3 | 6 | −123 | −58 | −89 | −17 | 12 | 6.5 |
| Net Addr | Dev EUI | Class | Joined | Seq Num | Up | Down | 1st | 2st | RSSI min | max | avg | SNR max | min | avg |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 00:00:10:01 | 00-4a-30-b0-00-1e-18-12 | A | 2019-04-29T16:56:47z | 754 | 141 | 134 | 125 | 4 | −75 | −21 | −39 | −1.7 | 6.5 | 4.1 |
| 00:00:10:02 | 00-4a-30-b0-00-1e-a5-40 | A | 2019-04-29T16:57:34z | 779 | 365 | 359 | 349 | 8 | −78 | −26 | −43 | −1.4 | 7 | 3.6 |
| 00:00:10:03 | 00-4a-30-b0-00-1e-17-81 | A | 2019-04-29T16:57:45z | 2777 | 229 | 215 | 101 | 105 | −81 | −30 | −39 | −2.5 | 5.5 | 4.1 |
| 00:00:10:04 | 00-4a-30-b0-00-1e-17-83 | A | 2019-04-29T16:57:55z | 3026 | 195 | 187 | 80 | 97 | −79 | −25 | −37 | 2.3 | 4.1 | 3.0 |
| 00:00:10:05 | 00-4a-30-b0-00-1e-8a-09 | A | 2019-04-29T16:58:11z | 156 | 39 | 32 | 32 | 0 | −87 | −22 | −29 | 1.6 | 5.3 | 2.7 |
| 00:00:10:06 | 00-4a-30-b0-00-1e-52-36 | A | 2019-04-29T16:58:26z | 312 | 26 | 21 | 15 | 6 | −80 | −24 | −31 | 3.5 | 6.1 | 4.1 |
| Gateway | Vehicle | Engineering School | Faculty of Tourism | El Ejido (Old Town) |
|---|---|---|---|---|
| Packets counted | 948 | 144 | 80 | 330 |
| LoRa packets (%) | 100 | 15.19 | 8.44 | 34.81 |
| T (℃) | p (Pa) | RH (%) | O (ppm) | Latitude () | Longitude () | Time |
|---|---|---|---|---|---|---|
| 24.3 | 101,454 | 47.2 | 0.065 | 36.727 | −4.42441 | 08:15:28 |
| 24.76 | 101,148 | 44.8 | 0.062 | 36.7273 | −4.41668 | 08:26:08 |
| 24.09 | 101,144 | 47.3 | 0.059 | 36.727 | −4.41693 | 08:28:40 |
| 23.79 | 101,146 | 47.3 | 0.071 | 36.7273 | −4.41678 | 08:31:14 |
| 23.69 | 101,160 | 48.4 | 0.07 | 36.727 | −4.4165 | 08:37:27 |
| 24.03 | 101,155 | 47.5 | 0.07 | 36.7272 | −4.41676 | 08:45:43 |
| 23.95 | 101,163 | 47.2 | 0.074 | 36.7271 | −4.41671 | 08:51:00 |
| 23.96 | 101,166 | 47.2 | 0.074 | 36.7271 | −4.41696 | 08:51:34 |
| 25.43 | 101,442 | 44.6 | 0.097 | 36.7245 | −4.42054 | 08:59:32 |
| 26.79 | 101,547 | 41.4 | 0.062 | 36.7199 | −4.4064 | 09:08:54 |
| 26.78 | 101,529 | 40.9 | 0.048 | 36.7215 | −4.38311 | 09:13:20 |
| 30.03 | 101,538 | 33.2 | 0.035 | 36.7202 | −4.36172 | 09:27:53 |
| 31.54 | 101,543 | 31.8 | 0.055 | 36.7202 | −4.36181 | 09:33:54 |
| 31.54 | 101,543 | 31.3 | 0.055 | 36.7202 | −4.36181 | 09:33:54 |
| 28.09 | 101,538 | 34.8 | 0.003 | 36.7221 | −4.37845 | 09:42:25 |
| 28.98 | 101,487 | 35.7 | 0.075 | 36.7198 | −4.36491 | 10:51:16 |
| 28.98 | 101,487 | 39.9 | 0.075 | 36.7198 | −4.36491 | 10:51:16 |
| 25.85 | 101,367 | 47.9 | 0.084 | 36.7142 | −4.33424 | 10:56:38 |
| 23.74 | 101,499 | 56.4 | 0.1 | 36.7208 | −4.35801 | 11:05:11 |
| 25.98 | 101,523 | 52.4 | 0.128 | 36.7225 | −4.39622 | 11:13:35 |
| 26.03 | 101,496 | 50.3 | 0.09 | 36.7201 | −4.40581 | 11:16:10 |
| 26.08 | 101,506 | 50.3 | 0.09 | 36.7192 | −4.40916 | 11:16:44 |
| 29.01 | 101,402 | 41.4 | 0.07 | 36.7169 | −4.43129 | 11:27:26 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bravo-Arrabal, J.; Fernandez-Lozano, J.J.; Serón, J.; Gomez-Ruiz, J.A.; García-Cerezo, A. Development and Implementation of a Hybrid Wireless Sensor Network of Low Power and Long Range for Urban Environments. Sensors 2021, 21, 567. https://0-doi-org.brum.beds.ac.uk/10.3390/s21020567
Bravo-Arrabal J, Fernandez-Lozano JJ, Serón J, Gomez-Ruiz JA, García-Cerezo A. Development and Implementation of a Hybrid Wireless Sensor Network of Low Power and Long Range for Urban Environments. Sensors. 2021; 21(2):567. https://0-doi-org.brum.beds.ac.uk/10.3390/s21020567
Chicago/Turabian StyleBravo-Arrabal, Juan, J. J. Fernandez-Lozano, Javier Serón, Jose Antonio Gomez-Ruiz, and Alfonso García-Cerezo. 2021. "Development and Implementation of a Hybrid Wireless Sensor Network of Low Power and Long Range for Urban Environments" Sensors 21, no. 2: 567. https://0-doi-org.brum.beds.ac.uk/10.3390/s21020567