A Review of Unoccupied Aerial Vehicle Use in Wetland Applications: Emerging Opportunities in Approach, Technology, and Data



Abstract
:1. Introduction
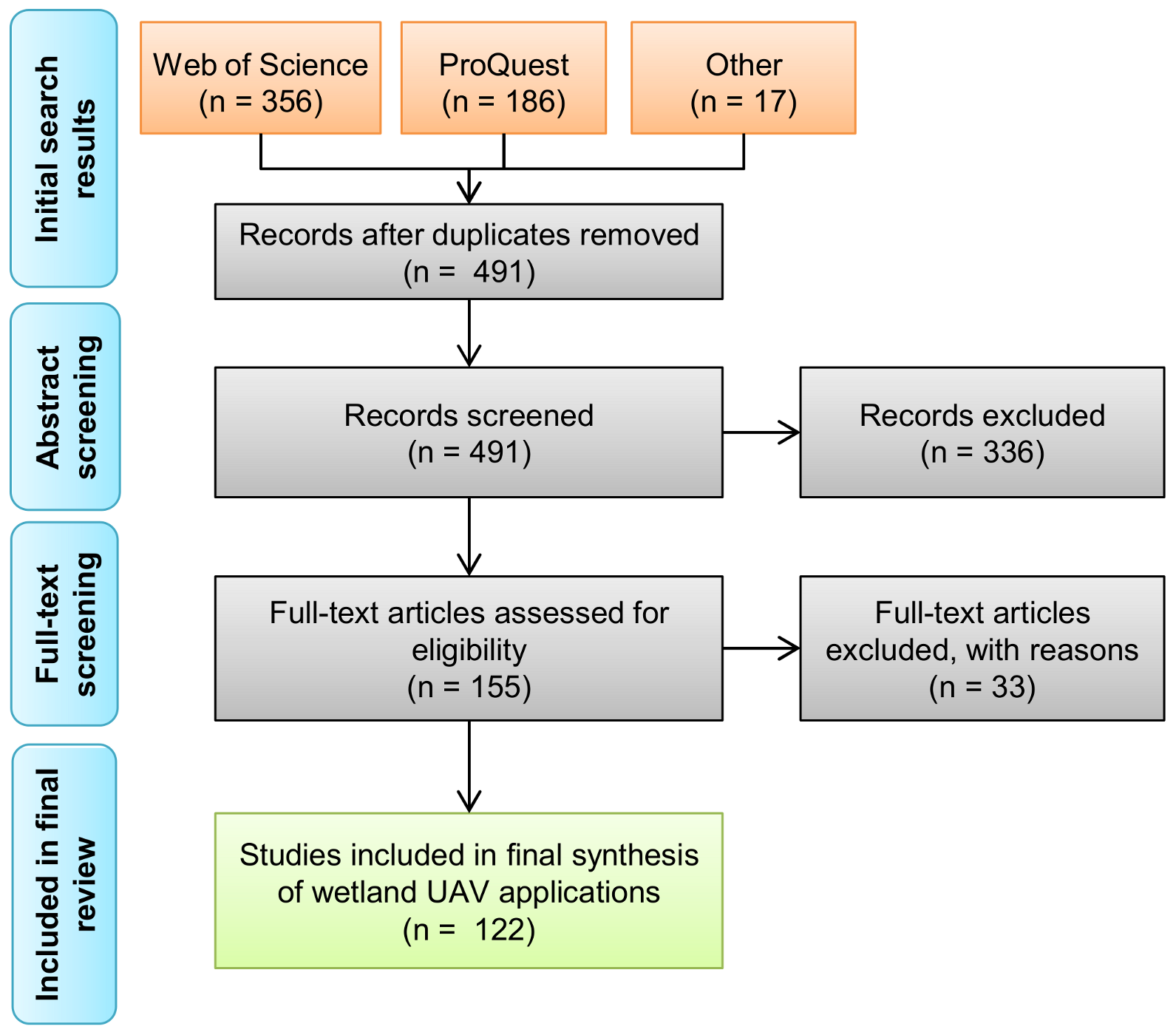
2. Scoping Literature Review
2.1. Literature Selection
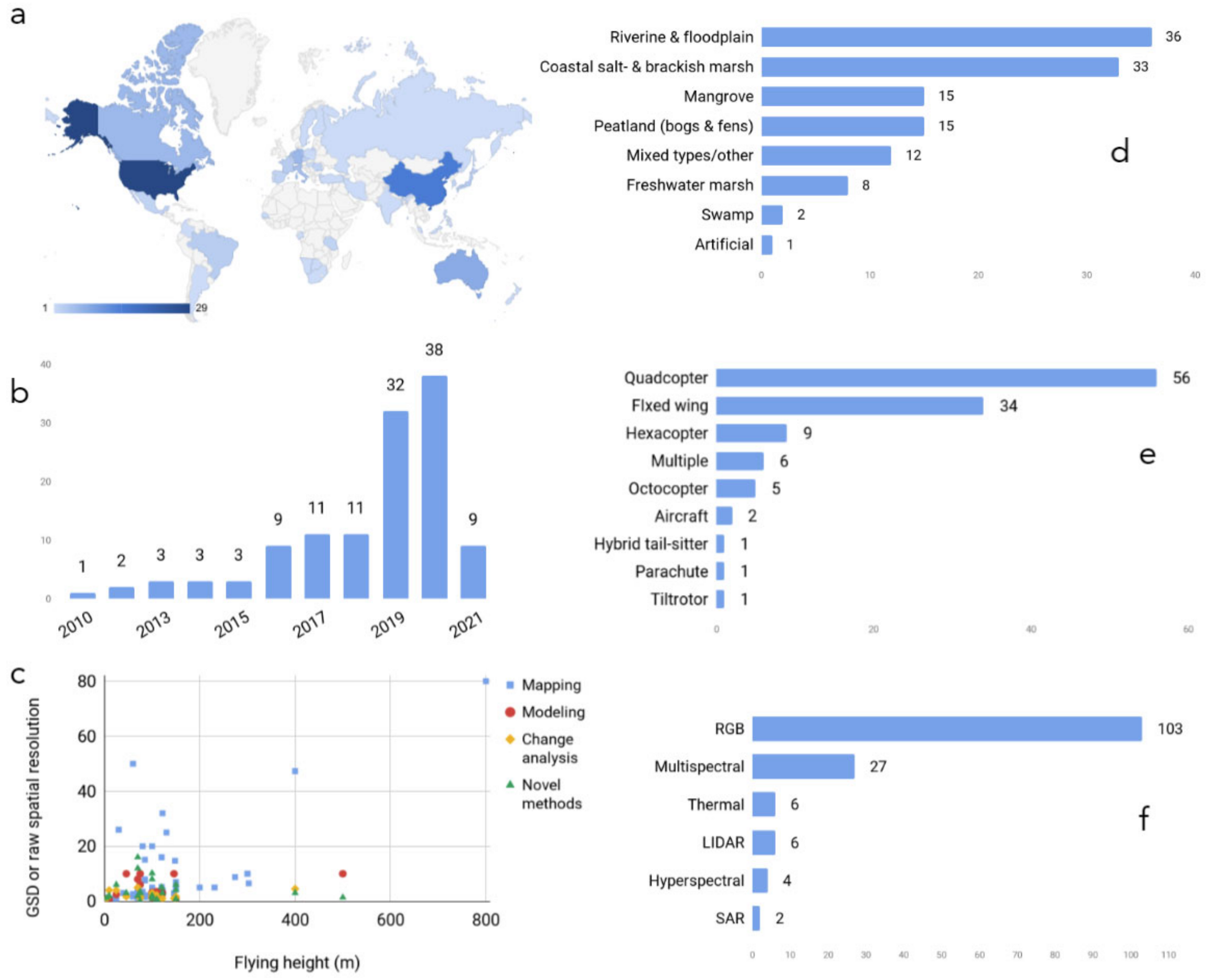
2.2. Geographic and Technical Characteristics of the Reviewed UAV Applications
3. Wetland Management Applications and Goals
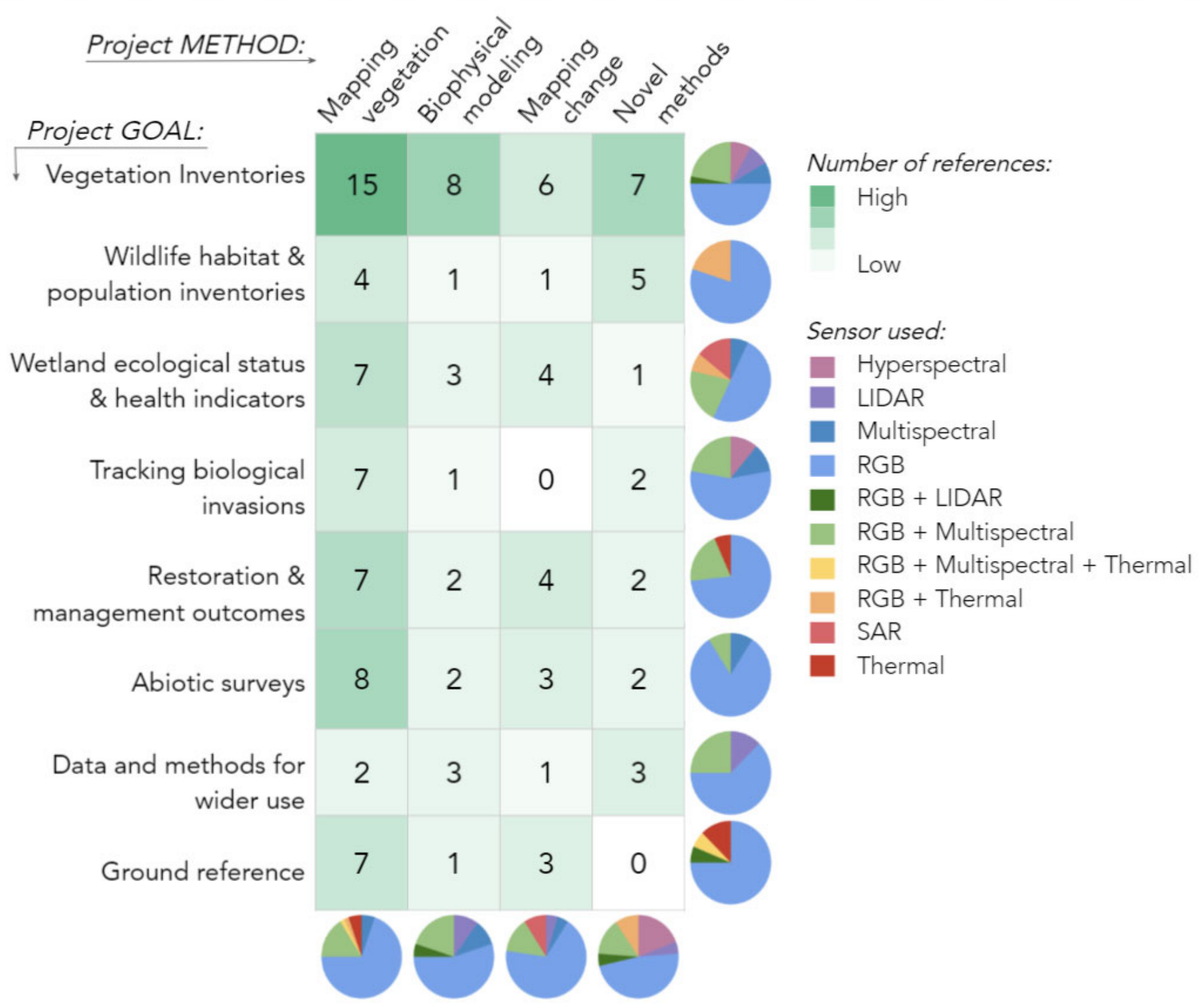
3.1. Broad Management Goals in Wetland UAV Applications
3.2. Vegetation Inventories
3.3. Wildlife Habitat and Population Inventories
3.4. Wetland Ecological Status and Health Indicators
3.5. Tracking Biological Invasions
3.6. Restoration and Management Outcomes
3.7. Abiotic Surveys
3.8. Data and Methods for Wider Use
3.9. Ground Reference Applications
4. Discussion
4.1. Technological Opportunities and Strenghts in Wetland Applications of UAVs
4.2. Field Operations in Wetland Setting
4.3. Considerations in UAV Data Processing and Management
4.4. Perspectives for UAV Use in Long-Term Wetland Monitoring
5. Emerging Trends
5.1. Emerging Technologies
5.2. Emerging Topics
5.3. Emerging Data Frameworks
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Manfreda, S.; McCabe, M.; Miller, P.; Lucas, R.; Pajuelo Madrigal, V.; Mallinis, G.; Ben Dor, E.; Helman, D.; Estes, L.; Ciraolo, G.; et al. On the Use of Unmanned Aerial Systems for Environmental Monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef] [Green Version]
- Johnston, D.W. Unoccupied Aircraft Systems in Marine Science and Conservation. Annu. Rev. Mar. Sci. 2019, 11, 439–463. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Coops, N.C.; Goodbody, T.R.H.; Cao, L. Four Steps to Extend Drone Use in Research. Nature 2019, 572, 433–435. [Google Scholar] [CrossRef] [PubMed]
- Akay, S.S.; Ozcan, O.; Sen, O.L. Modeling Morphodynamic Processes in a Meandering River with Unmanned Aerial Vehicle-Based Measurements. J. Appl. Remote Sens. 2019, 13, 1. [Google Scholar] [CrossRef]
- Pinton, D.; Canestrelli, A.; Wilkinson, B.; Ifju, P.; Ortega, A. A New Algorithm for Estimating Ground Elevation and Vegetation Characteristics in Coastal Salt Marshes from High-resolution UAV-based LiDAR Point Clouds. Earth Surf. Process. Landf. 2020, 45, 3687–3701. [Google Scholar] [CrossRef]
- Thamm, H.-P.; Menz, G.; Becker, M.; Kuria, D.N.; Misana, S.; Kohn, D. The Use of UAS for Assessing Agricultural Systems in a Wetland in Tanzania in the Dry- and Wet-Season for Sustainable Agriculture and Providing Ground Truth for Terra-SAR X Data. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, XL-1/W2, 401–406. [Google Scholar] [CrossRef] [Green Version]
- Gallo, R.; Ristorto, G.; Bojeri, A.; Zorzi, N.; Daglio, G.; Rinaldi, M.F.; Sauli, G.; Mazzetto, F. Assessment of Riparian Environments through Semi-Automated Procedures for the Computation of Eco-Morphological Indicators: Preliminary Results of the WEQUAL Project. Bodenkult. J. Land Manag. Food Environ. 2019, 70, 131–145. [Google Scholar] [CrossRef] [Green Version]
- Langhammer, J. UAV Monitoring of Stream Restorations. Hydrology 2019, 6, 29. [Google Scholar] [CrossRef] [Green Version]
- Dale, J.; Burnside, N.G.; Strong, C.J.; Burgess, H.M. The Use of Small-Unmanned Aerial Systems for High Resolution Analysis for Intertidal Wetland Restoration Schemes. Ecol. Eng. 2020, 143, 105695. [Google Scholar] [CrossRef]
- Knoth, C.; Klein, B.; Prinz, T.; Kleinebecker, T. Unmanned Aerial Vehicles as Innovative Remote Sensing Platforms for High-Resolution Infrared Imagery to Support Restoration Monitoring in Cut-over Bogs. Appl. Veg. Sci. 2013, 16, 509–517. [Google Scholar] [CrossRef]
- Harvey, M.C.; Hare, D.K.; Hackman, A.; Davenport, G.; Haynes, A.B.; Helton, A.; Lane, J.W.; Briggs, M.A. Evaluation of Stream and Wetland Restoration Using UAS-Based Thermal Infrared Mapping. Water 2019, 11, 1568. [Google Scholar] [CrossRef] [Green Version]
- Madden, M.; Jordan, T.; Bernardes, S.; Cotten, D.L.; O’Hare, N.; Pasqua, A. 10 Unmanned Aerial Systems and Structure from Motion Revolutionize Wetlands Mapping. In Remote sensing of wetlands: Applications and advances; Tiner, R.W., Lang, M.W., Klemas, V.V., Eds.; CRC Press: Boca Raton, FL, USA, 2015; pp. 195–219. [Google Scholar]
- Bolch, E.A.; Hestir, E.L.; Khanna, S. Performance and Feasibility of Drone-Mounted Imaging Spectroscopy for Invasive Aquatic Vegetation Detection. Remote Sens. 2021, 13, 582. [Google Scholar] [CrossRef]
- Cao, J.; Leng, W.; Liu, K.; Liu, L.; He, Z.; Zhu, Y. Object-Based Mangrove Species Classification Using Unmanned Aerial Vehicle Hyperspectral Images and Digital Surface Models. Remote Sens. 2018, 10, 89. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.S.; Wong, F.K.K.; Fung, T. Assessing the Utility of UAV-Borne Hyperspectral Image and Photogrammetry Derived 3D Data for Wetland Species Distribution Quick Mapping. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-2/W6, 209–215. [Google Scholar] [CrossRef] [Green Version]
- Adão, T.; Hruška, J.; Pádua, L.; Bessa, J.; Peres, E.; Morais, R.; Sousa, J. Hyperspectral Imaging: A Review on UAV-Based Sensors, Data Processing and Applications for Agriculture and Forestry. Remote Sens. 2017, 9, 1110. [Google Scholar] [CrossRef] [Green Version]
- Hogan, S.D.; Kelly, M.; Stark, B.; Chen, Y. Unmanned Aerial Systems for Agriculture and Natural Resources. Calif. Agric. 2017, 71, 5–14. [Google Scholar] [CrossRef] [Green Version]
- Kislik, C.; Dronova, I.; Kelly, M. UAVs in Support of Algal Bloom Research: A Review of Current Applications and Future Opportunities. Drones 2018, 2, 35. [Google Scholar] [CrossRef] [Green Version]
- Winter, T.C. The Vulnerability of Wetlands to Climte Change: A Hydrological Landscape Perspective. JAWRA J. Am. Water Resour. Assoc. 2000, 36, 305–311. [Google Scholar] [CrossRef]
- Davidson, N.C. How Much Wetland Has the World Lost? Long-Term and Recent Trends in Global Wetland Area. Mar. Freshw. Res. 2014, 65, 934–941. [Google Scholar] [CrossRef]
- Gibbs, J.P. Wetland Loss and Biodiversity Conservation. Conserv. Biol. 2000, 14, 314–317. [Google Scholar] [CrossRef] [Green Version]
- Hu, S.; Niu, Z.; Chen, Y.; Li, L.; Zhang, H. Global Wetlands: Potential Distribution, Wetland Loss, and Status. Sci. Total Environ. 2017, 586, 319–327. [Google Scholar] [CrossRef] [PubMed]
- Fernandes, M.R.; Aguiar, F.C.; Martins, M.J.; Rico, N.; Ferreira, M.T.; Correia, A.C. Carbon Stock Estimations in a Mediterranean Riparian Forest: A Case Study Combining Field Data and UAV Imagery. Forests 2020, 11, 376. [Google Scholar] [CrossRef] [Green Version]
- Broussard, W.P.; Visser, J.M.; Brooks, R.P. Quantifying Vegetation and Landscape Metrics with Hyperspatial Unmanned Aircraft System Imagery in a Coastal Oligohaline Marsh. Estuaries Coasts 2020. [Google Scholar] [CrossRef]
- Michez, A.; Piégay, H.; Jonathan, L.; Claessens, H.; Lejeune, P. Mapping of Riparian Invasive Species with Supervised Classification of Unmanned Aerial System (UAS) Imagery. Int. J. Appl. Earth Obs. Geoinf. 2016, 44, 88–94. [Google Scholar] [CrossRef]
- Taddeo, S.; Dronova, I. Indicators of Vegetation Development in Restored Wetlands. Ecol. Indic. 2018, 94, 454–467. [Google Scholar] [CrossRef]
- Michez, A.; Piégay, H.; Lisein, J.; Claessens, H.; Lejeune, P. Classification of Riparian Forest Species and Health Condition Using Multi-Temporal and Hyperspatial Imagery from Unmanned Aerial System. Environ. Monit. Assess. 2016, 188, 146. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Correll, M.D.; Elphick, C.S.; Hantson, W.; Cline, B.B.; Tymkiw, E.L.; Gregory Shriver, W.; Olsen, B.J. A Multi-Scale Comparison of Elevation Measurement Methods in Northeastern Tidal Marshes of the United States. Wetlands 2019, 39, 633–643. [Google Scholar] [CrossRef]
- Durgan, S.D.; Zhang, C.; Duecaster, A.; Fourney, F.; Su, H. Unmanned Aircraft System Photogrammetry for Mapping Diverse Vegetation Species in a Heterogeneous Coastal Wetland. Wetlands 2020, 40, 2621–2633. [Google Scholar] [CrossRef]
- Mahdianpari, M.; Granger, J.E.; Mohammadimanesh, F.; Salehi, B.; Brisco, B.; Homayouni, S.; Gill, E.; Huberty, B.; Lang, M. Meta-Analysis of Wetland Classification Using Remote Sensing: A Systematic Review of a 40-Year Trend in North America. Remote Sens. 2020, 12, 1882. [Google Scholar] [CrossRef]
- White, L.; Ryerson, R.A.; Pasher, J.; Duffe, J. State of Science Assessment of Remote Sensing of Great Lakes Coastal Wetlands: Responding to an Operational Requirement. Remote Sens. 2020, 12, 3024. [Google Scholar] [CrossRef]
- Isokangas, E.; Davids, C.; Kujala, K.; Rauhala, A.; Ronkanen, A.-K.; Rossi, P.M. Combining Unmanned Aerial Vehicle-Based Remote Sensing and Stable Water Isotope Analysis to Monitor Treatment Peatlands of Mining Areas. Ecol. Eng. 2019, 133, 137–147. [Google Scholar] [CrossRef]
- Doughty, C.L.; Ambrose, R.F.; Okin, G.S.; Cavanaugh, K.C. Characterizing Spatial Variability in Coastal Wetland Biomass across Multiple Scales Using UAV and Satellite Imagery. Remote Sens. Ecol. Conserv. 2021, rse2.198. [Google Scholar] [CrossRef]
- Medvedev, A.; Telnova, N.; Alekseenko, N.; Koshkarev, A.; Kuznetchenko, P.; Asmaryan, S.; Narykov, A. UAV-Derived Data Application for Environmental Monitoring of the Coastal Area of Lake Sevan, Armenia with a Changing Water Level. Remote Sens. 2020, 12, 3821. [Google Scholar] [CrossRef]
- Harris, A.; Baird, A.J. Microtopographic Drivers of Vegetation Patterning in Blanket Peatlands Recovering from Erosion. Ecosystems 2019, 22, 1035–1054. [Google Scholar] [CrossRef] [Green Version]
- Lyons, M.B.; Brandis, K.J.; Murray, N.J.; Wilshire, J.H.; McCann, J.A.; Kingsford, R.T.; Callaghan, C.T. Monitoring Large and Complex Wildlife Aggregations with Drones. Methods Ecol. Evol. 2019, 10, 1024–1035. [Google Scholar] [CrossRef] [Green Version]
- Jeziorska, J. UAS for Wetland Mapping and Hydrological Modeling. Remote Sens. 2019, 11, 1997. [Google Scholar] [CrossRef] [Green Version]
- Vélez-Nicolás, M.; García-López, S.; Barbero, L.; Ruiz-Ortiz, V.; Sánchez-Bellón, Á. Applications of Unmanned Aerial Systems (UASs) in Hydrology: A Review. Remote Sens. 2021, 13, 1359. [Google Scholar] [CrossRef]
- Cowardin, L.M.; Carter, V.; Golet, F.C.; LaRoe, E.T. Classification of Wetlands and Deepwater Habitats of the United States; U.S. Fish and Wildlife Service Report No. FWS/OBS/-79/31; U.S. Fish and Wildlife Service: Washington, DC, USA, 1979.
- Zweig, C.L.; Burgess, M.A.; Percival, H.F.; Kitchens, W.M. Use of Unmanned Aircraft Systems to Delineate Fine-Scale Wetland Vegetation Communities. Wetlands 2015, 35, 303–309. [Google Scholar] [CrossRef]
- Morgan, B.E.; Bolger, D.T.; Chipman, J.W.; Dietrich, J.T. Lateral and Longitudinal Distribution of Riparian Vegetation along an Ephemeral River in Namibia Using Remote Sensing Techniques. J. Arid Environ. 2020, 181, 104220. [Google Scholar] [CrossRef]
- De Faxina, R.R.C.; da Silva, C.R. Extraction of Mauritia Flexuosa in Orthophotos Obtained by UAV. Nat. Conserv. 2020, 13, 32–42. [Google Scholar] [CrossRef]
- Pontee, N.I.; Serato, B. Nearfield Erosion at the Steart Marshes (UK) Managed Realignment Scheme Following Opening. Ocean. Coast. Manag. 2019, 172, 64–81. [Google Scholar] [CrossRef]
- Khakhim, N.; Marfai, M.A.; Wicaksono, A.; Lazuardi, W.; Isnaen, Z.; Walinono, T. Mangrove Ecosystem Data Inventory Using Unmanned Aerial Vehicles (UAVs) in Yogyakarta Coastal Area. In Proceedings of the Sixth Geoinformation Science Symposium, Yogyakarta, Indonesia, 26–27 August 2019; Wibowo, S.B., Rimba, A.B., Aziz, A., Phinn, S., Sri Sumantyo, J.T., Widyasamratri, H., Arjasakusuma, S., Eds.; SPIE: Yogyakarta, Indonesia, 2019; p. 14. [Google Scholar]
- Collas, F.P.L.; van Iersel, W.K.; Straatsma, M.W.; Buijse, A.D.; Leuven, R.S.E.W. Sub-Daily Temperature Heterogeneity in a Side Channel and the Influence on Habitat Suitability of Freshwater Fish. Remote Sens. 2019, 11, 2367. [Google Scholar] [CrossRef] [Green Version]
- Legleiter, C.J.; Roberts, D.A.; Marcus, W.A.; Fonstad, M.A. Passive Optical Remote Sensing of River Channel Morphology and In-Stream Habitat: Physical Basis and Feasibility. Remote Sens. Environ. 2004, 93, 493–510. [Google Scholar] [CrossRef] [Green Version]
- Boon, M.A.; Greenfield, R.; Tesfamichael, S. Wetland Assessment Using Unmanned Aerial Vehicle (UAV) Photogrammetry. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B1, 781–788. [Google Scholar] [CrossRef] [Green Version]
- Venturi, S.; Di Francesco, S.; Materazzi, F.; Manciola, P. Unmanned Aerial Vehicles and Geographical Information System Integrated Analysis of Vegetation in Trasimeno Lake, Italy. Lakes Reserv. Res. Manag. 2016, 21, 5–19. [Google Scholar] [CrossRef]
- Henderson, F.M.; Lewis, A.J. Radar Detection of Wetland Ecosystems: A Review. Int. J. Remote Sens. 2008, 29, 5809–5835. [Google Scholar] [CrossRef]
- Brisco, B. Mapping and Monitoring Surface Water and Wetlands with Synthetic Aperture Radar. In Remote Sensing of Wetlands; Tiner, R.W., Lang, M.W., Klemas, V.V., Eds.; CRC Press: Boca Raton, FL, USA, 2015; pp. 119–136. ISBN 978-0-429-18329-4. [Google Scholar]
- Evans, T.L.; Costa, M.; Tomas, W.M.; Camilo, A.R. Large-Scale Habitat Mapping of the Brazilian Pantanal Wetland: A Synthetic Aperture Radar Approach. Remote Sens. Environ. 2014, 155, 89–108. [Google Scholar] [CrossRef]
- Amani, M.; Mahdavi, S.; Berard, O. Supervised Wetland Classification Using High Spatial Resolution Optical, SAR, and LiDAR Imagery. J. Appl. Remote Sens. 2020, 14, 1. [Google Scholar] [CrossRef]
- Navarro, A.; Young, M.; Allan, B.; Carnell, P.; Macreadie, P.; Ierodiaconou, D. The Application of Unmanned Aerial Vehicles (UAVs) to Estimate above-Ground Biomass of Mangrove Ecosystems. Remote Sens. Environ. 2020, 242, 111747. [Google Scholar] [CrossRef]
- Dugdale, S.J.; Malcolm, I.A.; Hannah, D.M. Drone-Based Structure-from-Motion Provides Accurate Forest Canopy Data to Assess Shading Effects in River Temperature Models. Sci. Total Environ. 2019, 678, 326–340. [Google Scholar] [CrossRef]
- Oldeland, J.; Revermann, R.; Luther-Mosebach, J.; Buttschardt, T.; Lehmann, J.R.K. New Tools for Old Problems—Comparing Drone- and Field-Based Assessments of a Problematic Plant Species. Environ. Monit. Assess. 2021, 193, 90. [Google Scholar] [CrossRef]
- Beyer, F.; Jurasinski, G.; Couwenberg, J.; Grenzdörffer, G. Multisensor Data to Derive Peatland Vegetation Communities Using a Fixed-Wing Unmanned Aerial Vehicle. Int. J. Remote Sens. 2019, 40, 9103–9125. [Google Scholar] [CrossRef]
- Dale, J.; Burnside, N.G.; Hill-Butler, C.; Berg, M.J.; Strong, C.J.; Burgess, H.M. The Use of Unmanned Aerial Vehicles to Determine Differences in Vegetation Cover: A Tool for Monitoring Coastal Wetland Restoration Schemes. Remote Sens. 2020, 12, 4022. [Google Scholar] [CrossRef]
- Genchi, S.A.; Vitale, A.J.; Perillo, G.M.E.; Seitz, C.; Delrieux, C.A. Mapping Topobathymetry in a Shallow Tidal Environment Using Low-Cost Technology. Remote Sens. 2020, 12, 1394. [Google Scholar] [CrossRef]
- Pádua, L.; Vanko, J.; Hruška, J.; Adão, T.; Sousa, J.J.; Peres, E.; Morais, R. UAS, Sensors, and Data Processing in Agroforestry: A Review towards Practical Applications. Int. J. Remote Sens. 2017, 38, 2349–2391. [Google Scholar] [CrossRef]
- Fritz, A.; Kattenborn, T.; Koch, B. UAV-Based Photogrammetric Point Clouds—Tree Stem Mapping in Open Stands in Comparison to Terrestrial Laser Scanner Point Clouds. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, XL-1/W2, 141–146. [Google Scholar] [CrossRef] [Green Version]
- Dufour, S.; Bernez, I.; Betbeder, J.; Corgne, S.; Hubert-Moy, L.; Nabucet, J.; Rapinel, S.; Sawtschuk, J.; Trollé, C. Monitoring Restored Riparian Vegetation: How Can Recent Developments in Remote Sensing Sciences Help? Knowl. Manag. Aquat. Ecosyst. 2013, 10. [Google Scholar] [CrossRef]
- Navarro, J.A.; Algeet, N.; Fernández-Landa, A.; Esteban, J.; Rodríguez-Noriega, P.; Guillén-Climent, M.L. Integration of UAV, Sentinel-1, and Sentinel-2 Data for Mangrove Plantation Aboveground Biomass Monitoring in Senegal. Remote Sens. 2019, 11, 77. [Google Scholar] [CrossRef] [Green Version]
- Francis, R.J.; Lyons, M.B.; Kingsford, R.T.; Brandis, K.J. Counting Mixed Breeding Aggregations of Animal Species Using Drones: Lessons from Waterbirds on Semi-Automation. Remote Sens. 2020, 12, 1185. [Google Scholar] [CrossRef] [Green Version]
- Woellner, R.; Wagner, T.C. Saving Species, Time and Money: Application of Unmanned Aerial Vehicles (UAVs) for Monitoring of an Endangered Alpine River Specialist in a Small Nature Reserve. Biol. Conserv. 2019, 233, 162–175. [Google Scholar] [CrossRef]
- Flores-de-Santiago, F.; Valderrama-Landeros, L.; Rodríguez-Sobreyra, R.; Flores-Verdugo, F. Assessing the Effect of Flight Altitude and Overlap on Orthoimage Generation for UAV Estimates of Coastal Wetlands. J. Coast. Conserv. 2020, 24, 35. [Google Scholar] [CrossRef]
- Pinton, D.; Canestrelli, A.; Fantuzzi, L. A UAV-Based Dye-Tracking Technique to Measure Surface Velocities over Tidal Channels and Salt Marshes. J. Mar. Sci. Eng. 2020, 8, 364. [Google Scholar] [CrossRef]
- Fletcher, A.; Mather, R. Hypertemporal Imaging Capability of UAS Improves Photogrammetric Tree Canopy Models. Remote Sens. 2020, 12, 1238. [Google Scholar] [CrossRef] [Green Version]
- Samiappan, S.; Turnage, G.; Hathcock, L.; Casagrande, L.; Stinson, P.; Moorhead, R. Using Unmanned Aerial Vehicles for High-Resolution Remote Sensing to Map Invasive Phragmites Australis in Coastal Wetlands. Int. J. Remote Sens. 2017, 38, 2199–2217. [Google Scholar] [CrossRef]
- Bertacchi, A.; Giannini, V.; Di Franco, C.; Silvestri, N. Using Unmanned Aerial Vehicles for Vegetation Mapping and Identification of Botanical Species in Wetlands. Landsc. Ecol. Eng. 2019, 15, 231–240. [Google Scholar] [CrossRef]
- Díaz-Varela, R.A.; Calvo Iglesias, S.; Cillero Castro, C.; Díaz Varela, E.R. Sub-Metric Analisis of Vegetation Structure in Bog-Heathland Mosaics Using Very High Resolution Rpas Imagery. Ecol. Indic. 2018, 89, 861–873. [Google Scholar] [CrossRef]
- Zhu, Y.; Liu, K.W.; Myint, S.; Du, Z.; Li, Y.; Cao, J.; Liu, L.; Wu, Z. Integration of GF2 Optical, GF3 SAR, and UAV Data for Estimating Aboveground Biomass of China’s Largest Artificially Planted Mangroves. Remote Sens. 2020, 12, 2039. [Google Scholar] [CrossRef]
- Daryaei, A.; Sohrabi, H.; Atzberger, C.; Immitzer, M. Fine-Scale Detection of Vegetation in Semi-Arid Mountainous Areas with Focus on Riparian Landscapes Using Sentinel-2 and UAV Data. Comput. Electron. Agric. 2020, 177, 105686. [Google Scholar] [CrossRef]
- Li, N.; Zhou, D.; Duan, F.; Wang, S.; Cui, Y. Application of Unmanned Airship Image System and Processing Techniques for Identifying of Fresh Water Wetlands at a Community Scale. In Proceedings of the 2010 18th International Conference on Geoinformatics, Beijing, China, 18–20 June 2010; pp. 1–5. [Google Scholar]
- Wan, H.; Wang, Q.; Jiang, D.; Fu, J.; Yang, Y.; Liu, X. Monitoring the Invasion of Spartina Alterniflora Using Very High Resolution Unmanned Aerial Vehicle Imagery in Beihai, Guangxi (China). Sci. World J. 2014, 2014, 1–7. [Google Scholar]
- Thayn, J.B. Monitoring Narrow Mangrove Stands in Baja California Sur, Mexico Using Linear Spectral Unmixing. Mar. Geod. 2020, 43, 493–508. [Google Scholar] [CrossRef]
- Liu, T.; Abd-Elrahman, A.; Dewitt, B.; Smith, S.; Morton, J.; Wilhelm, V.L. Evaluating the Potential of Multi-View Data Extraction from Small Unmanned Aerial Systems (UASs) for Object-Based Classification for Wetland Land Covers. GIScience Remote Sens. 2019, 56, 130–159. [Google Scholar] [CrossRef]
- Shang, W.; Gao, Z.; Jiang, X.; Chen, M. The Extraction of Wetland Vegetation Information Based on UAV Remote Sensing Images. In Proceedings of the Remote Sensing and Modeling of Ecosystems for Sustainability XV; Gao, W., Chang, N.-B., Wang, J., Eds.; SPIE: San Diego, CA, USA, 2018; p. 38. [Google Scholar]
- Mancini, A.; Frontoni, E.; Zingaretti, P.; Longhi, S. High-Resolution Mapping of River and Estuary Areas by Using Unmanned Aerial and Surface Platforms. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 534–542. [Google Scholar]
- Pashaei, M.; Kamangir, H.; Starek, M.J.; Tissot, P. Review and Evaluation of Deep Learning Architectures for Efficient Land Cover Mapping with UAS Hyper-Spatial Imagery: A Case Study Over a Wetland. Remote Sens. 2020, 12, 959. [Google Scholar] [CrossRef] [Green Version]
- Castellanos-Galindo, G.A.; Casella, E.; Mejía-Rentería, J.C.; Rovere, A. Habitat Mapping of Remote Coasts: Evaluating the Usefulness of Lightweight Unmanned Aerial Vehicles for Conservation and Monitoring. Biol. Conserv. 2019, 239, 108282. [Google Scholar] [CrossRef]
- Palace, M.; Herrick, C.; DelGreco, J.; Finnell, D.; Garnello, A.; McCalley, C.; McArthur, K.; Sullivan, F.; Varner, R. Determining Subarctic Peatland Vegetation Using an Unmanned Aerial System (UAS). Remote Sens. 2018, 10, 1498. [Google Scholar] [CrossRef] [Green Version]
- Rupasinghe, P.A.; Simic Milas, A.; Arend, K.; Simonson, M.A.; Mayer, C.; Mackey, S. Classification of Shoreline Vegetation in the Western Basin of Lake Erie Using Airborne Hyperspectral Imager HSI2, Pleiades and UAV Data. Int. J. Remote Sens. 2019, 40, 3008–3028. [Google Scholar] [CrossRef]
- Corti Meneses, N.; Brunner, F.; Baier, S.; Geist, J.; Schneider, T. Quantification of Extent, Density, and Status of Aquatic Reed Beds Using Point Clouds Derived from UAV–RGB Imagery. Remote Sens. 2018, 10, 1869. [Google Scholar] [CrossRef] [Green Version]
- Ostroukhov, A.V.; Klimina, E.M.; Institute of Water and Ecology Problems FEB RAS; Kuptsova, V.A. Landscape Mapping of Hard-to-Reach Areas. A Case Study for the Bolonsky State Nature Reserve (Russia). Institute of Water and Ecology Problems FEB RAS. Nat. Conserv. Res. 2020, 5. [Google Scholar] [CrossRef]
- Ren, L.; Liu, Y.; Zhang, S.; Cheng, L.; Guo, Y.; Ding, A. Vegetation Properties in Human-Impacted Riparian Zones Based on Unmanned Aerial Vehicle (UAV) Imagery: An Analysis of River Reaches in the Yongding River Basin. Forests 2020, 12, 22. [Google Scholar] [CrossRef]
- Wang, D.; Wan, B.; Liu, J.; Su, Y.; Guo, Q.; Qiu, P.; Wu, X. Estimating Aboveground Biomass of the Mangrove Forests on Northeast Hainan Island in China Using an Upscaling Method from Field Plots, UAV-LiDAR Data and Sentinel-2 Imagery. Int. J. Appl. Earth Obs. Geoinf. 2020, 85, 101986. [Google Scholar] [CrossRef]
- DiGiacomo, A.E.; Bird, C.N.; Pan, V.G.; Dobroski, K.; Atkins-Davis, C.; Johnston, D.W.; Ridge, J.T. Modeling Salt Marsh Vegetation Height Using Unoccupied Aircraft Systems and Structure from Motion. Remote Sens. 2020, 12, 2333. [Google Scholar] [CrossRef]
- Zhu, X.; Hou, Y.; Weng, Q.; Chen, L. Integrating UAV Optical Imagery and LiDAR Data for Assessing the Spatial Relationship between Mangrove and Inundation across a Subtropical Estuarine Wetland. ISPRS J. Photogramm. Remote Sens. 2019, 149, 146–156. [Google Scholar] [CrossRef]
- Van Iersel, W.K.; Straatsma, M.W.; Addink, E.A.; Middelkoop, H. Monitoring Phenology of Floodplain Grassland and Herbaceous Vegetation with UAV Imagery. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B7, 569–571. [Google Scholar] [CrossRef]
- Van Iersel, W.; Straatsma, M.; Middelkoop, H.; Addink, E. Multitemporal Classification of River Floodplain Vegetation Using Time Series of UAV Images. Remote Sens. 2018, 10, 1144. [Google Scholar] [CrossRef] [Green Version]
- Van Iersel, W.; Straatsma, M.; Addink, E.; Middelkoop, H. Monitoring Height and Greenness of Non-Woody Floodplain Vegetation with UAV Time Series. ISPRS J. Photogramm. Remote Sens. 2018, 141, 112–123. [Google Scholar] [CrossRef]
- Laslier, M.; Hubert-Moy, L.; Corpetti, T.; Dufour, S. Monitoring the Colonization of Alluvial Deposits Using Multitemporal UAV RGB -imagery. Appl. Veg. Sci. 2019, 22, 561–572. [Google Scholar] [CrossRef]
- Tóth, V.R. Monitoring Spatial Variability and Temporal Dynamics of Phragmites Using Unmanned Aerial Vehicles. Front. Plant. Sci. 2018, 9, 728. [Google Scholar] [CrossRef]
- Banerjee, B.; Raval, S.; Cullen, P. High-Resolution Mapping of Upland Swamp Vegetation Using an Unmanned Aerial Vehicle-Hyperspectral System. J. Spectr. Imaging 2017, a6. [Google Scholar] [CrossRef]
- Yin, D.; Wang, L. Individual Mangrove Tree Measurement Using UAV-Based LiDAR Data: Possibilities and Challenges. Remote Sens. Environ. 2019, 223, 34–49. [Google Scholar] [CrossRef]
- Barnas, A.F.; Darby, B.J.; Vandeberg, G.S.; Rockwell, R.F.; Ellis-Felege, S.N. A Comparison of Drone Imagery and Ground-Based Methods for Estimating the Extent of Habitat Destruction by Lesser Snow Geese (Anser Caerulescens Caerulescens) in La Pérouse Bay. PLoS ONE 2019, 14, e0217049. [Google Scholar] [CrossRef] [Green Version]
- Bloom, D.; Butcher, P.A.; Colefax, A.P.; Provost, E.J.; Cullis, B.R.; Kelaher, B.P. Drones Detect Illegal and Derelict Crab Traps in a Shallow Water Estuary. Fish. Manag. Ecol. 2019, 26, 311–318. [Google Scholar] [CrossRef]
- Chabot, D.; Carignan, V.; Bird, D.M. Measuring Habitat Quality for Least Bitterns in a Created Wetland with Use of a Small Unmanned Aircraft. Wetlands 2014, 34, 527–533. [Google Scholar] [CrossRef]
- Jones, W.R.; Hartley, S.B.; Stagg, C.L.; Osland, M.J. Using UAS Capabilities to Help Identify Hummock-Hollow Formation and Fragmentation in Critical Marsh Habitat (Spartina Patens) for Mottled Ducks in Southeast. Texas; Open-File Report; US Geological Survey: Reston, VA, USA, 2019; 15 pp.
- Puttock, A.K.; Cunliffe, A.M.; Anderson, K.; Brazier, R.E. Aerial Photography Collected with a Multirotor Drone Reveals Impact of Eurasian Beaver Reintroduction on Ecosystem Structure. J. Unmanned Veh. Syst. 2015, 3, 123–130. [Google Scholar] [CrossRef]
- McKellar, A.E.; Shephard, N.G.; Chabot, D. Dual Visible-thermal Camera Approach Facilitates Drone Surveys of Colonial Marshbirds. Remote Sens. Ecol. Conserv. 2020, rse2.183. [Google Scholar] [CrossRef]
- Gülci, S.; Akay, A.E. Using Thermal Infrared Imagery Produced by Unmanned Air Vehicles to Evaluate Locations of Ecological Road Structures. İstanbul Üniversitesi Orman Fakültesi Derg. 2015, 66. [Google Scholar] [CrossRef]
- Ionescu, D.T.; Hodor, C.V.; Petritan, I.C. Artificial Wetlands as Breeding Habitats for Colonial Waterbirds within Central Romania. Diversity 2020, 12, 371. [Google Scholar] [CrossRef]
- Espriella, M.C.; Lecours, V.C.; Frederick, P.V.; Camp, E.; Wilkinson, B. Quantifying Intertidal Habitat Relative Coverage in a Florida Estuary Using UAS Imagery and GEOBIA. Remote Sens. 2020, 12, 677. [Google Scholar] [CrossRef] [Green Version]
- Cândido, A.K.A.A.; Filho, A.C.P.; da Silva, N.M.; Haupenthal, M.R.; Amorim, G.M. Bays and Saline Pond Classification Generated from the Nhecolândia Pantanal Aerial Photograph Vegetation Indexes. Water. Air. Soil Pollut. 2017, 228, 354. [Google Scholar] [CrossRef]
- Karl, J.W.; Yelich, J.V.; Ellison, M.J.; Lauritzen, D. Estimates of Willow (Salix Spp.) Canopy Volume Using Unmanned Aerial Systems. Rangel. Ecol. Manag. 2020, 73, 531–537. [Google Scholar] [CrossRef]
- García-López, S.; Ruiz-Ortiz, V.; Barbero, L.; Sánchez-Bellón, Á. Contribution of the UAS to the Determination of the Water Budget in a Coastal Wetland: A Case Study in the Natural Park of the Bay of Cádiz (SW Spain). Eur. J. Remote Sens. 2018, 51, 965–977. [Google Scholar] [CrossRef] [Green Version]
- Niwa, H. Assessing the Activity of Deer and Their Influence on Vegetation in a Wetland Using Automatic Cameras and Low Altitude Remote Sensing (LARS). Eur. J. Wildl. Res. 2021, 67, 3. [Google Scholar] [CrossRef]
- Ramsey, E.; Rangoonwala, A.; Chi, Z.; Jones, C.E.; Bannister, T. Marsh Dieback, Loss, and Recovery Mapped with Satellite Optical, Airborne Polarimetric Radar, and Field Data. Remote Sens. Environ. 2014, 152, 364–374. [Google Scholar] [CrossRef]
- Ramsey, E.; Rangoonwala, A.; Jones, C.E. Marsh Canopy Structure Changes and the Deepwater Horizon Oil Spill. Remote Sens. Environ. 2016, 186, 350–357. [Google Scholar] [CrossRef]
- Niwa, H.; Hori, M. Patch Dynamics of Euphorbia Adenochlora and Relationship between Patch Area of E. Adenochlora and Disturbance Elements in the Honme River. Ecol. Civ. Eng. 2020, 23, 37–46. [Google Scholar] [CrossRef]
- Marcaccio, J.; Chow-Fraser, P. Mapping Options to Track Distribution of Invasive Phragmites Australis in the Great Lakes Basin in Canada. In Proceedings of the 3rd International Conference “Water resources and wetlands”, Tulcea, Romania, 8–10 September 2016. [Google Scholar]
- Zaman, B.; Jensen, A.M.; McKee, M. Use of High-Resolution Multispectral Imagery Acquired with an Autonomous Unmanned Aerial Vehicle to Quantify the Spread of an Invasive Wetlands Species. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 803–806. [Google Scholar]
- Kentsch, S.; Cabezas, M.; Tomhave, L.; Groß, J.; Burkhard, B.; Lopez Caceres, M.L.; Waki, K.; Diez, Y. Analysis of UAV-Acquired Wetland Orthomosaics Using GIS, Computer Vision, Computational Topology and Deep Learning. Sensors 2021, 21, 471. [Google Scholar] [CrossRef]
- Cohen, J.G.; Lewis, M.J. Development of an Automated Monitoring Platform for Invasive Plants in a Rare Great Lakes Ecosystem Using Uncrewed Aerial Systems and Convolutional Neural Networks *. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 1553–1564. [Google Scholar]
- Howell, A.; Richardson, R.J. Estimating Standing Biomass of Exotic Macrophytes Using SUAS. In Proceedings of the Autonomous Air and Ground Sensing Systems for Agricultural Optimization and Phenotyping IV; Thomasson, J.A., McKee, M., Moorhead, R.J., Eds.; SPIE: Baltimore, MD, USA, 2019; p. 32. [Google Scholar]
- Yuan, L.; Chen, Y.; Wang, H.; Cao, H.; Zhao, Z.; Tang, C.; Zhang, L. Windows of Opportunity for Salt Marsh Establishment: The Importance for Salt Marsh Restoration in the Yangtze Estuary. Ecosphere 2020, 11. [Google Scholar] [CrossRef]
- Sadat-Noori, M.; Rankin, C.; Rayner, D.; Heimhuber, V.; Gaston, T.; Drummond, C.; Chalmers, A.; Khojasteh, D.; Glamore, W. Coastal Wetlands Can Be Saved from Sea Level Rise by Recreating Past Tidal Regimes. Sci. Rep. 2021, 11, 1196. [Google Scholar] [CrossRef]
- White, L.; McGovern, M.; Hayne, S.; Touzi, R.; Pasher, J.; Duffe, J. Investigating the Potential Use of RADARSAT-2 and UAS Imagery for Monitoring the Restoration of Peatlands. Remote Sens. 2020, 12, 2383. [Google Scholar] [CrossRef]
- Bedell, E.; Leslie, M.; Fankhauser, K.; Burnett, J.; Wing, M.G.; Thomas, E.A. Unmanned Aerial Vehicle-Based Structure from Motion Biomass Inventory Estimates. J. Appl. Remote Sens. 2017, 11, 026026. [Google Scholar] [CrossRef] [Green Version]
- Lishawa, S.C.; Carson, B.D.; Brandt, J.S.; Tallant, J.M.; Reo, N.J.; Albert, D.A.; Monks, A.M.; Lautenbach, J.M.; Clark, E. Mechanical Harvesting Effectively Controls Young Typha Spp. Invasion and Unmanned Aerial Vehicle Data Enhances Post-Treatment Monitoring. Front. Plant. Sci. 2017, 8, 619. [Google Scholar] [CrossRef]
- Giannini, V.; Bertacchi, A.; Bonari, E.; Silvestri, N. Recolonisation by Spontaneous Vegetation of a Rewetted Peatland after Topsoil Removal: A Focus on Biomass Production and Nutrient Uptake. Wetlands 2019, 39, 1079–1087. [Google Scholar] [CrossRef]
- Nedelcut, F.; Zinke, P.; Epure, S.; Andrei, A.; Hauk, N. Restoration of the Aquatic and Terrestrial Ecosystem Complex of Fundu Mare Island, Romania. In Proceedings of the 11th International Symposium on Ecohydraulics, Melbourne, Australia, 7–12 February 2016. [Google Scholar]
- Kim, K.-L.; Kim, B.-J.; Lee, Y.-K.; Ryu, J.-H. Generation of a Large-Scale Surface Sediment Classification Map Using Unmanned Aerial Vehicle (UAV) Data: A Case Study at the Hwang-Do Tidal Flat, Korea. Remote Sens. 2019, 11, 229. [Google Scholar] [CrossRef] [Green Version]
- Lan, D.; Rui-Hong, Y. New Grassland Riparian Zone Delineation Method for Calculating Ecological Water Demand to Guide Management Goals. River Res. Appl. 2020, 36, 1838–1851. [Google Scholar] [CrossRef]
- Moore, G.E.; Burdick, D.M.; Routhier, M.R.; Novak, A.B.; Payne, A.R. Effects of a Large-Scale, Natural Sediment Deposition Event on Plant Cover in a Massachusetts Salt Marsh. PLoS ONE 2021, 16, e0245564. [Google Scholar] [CrossRef]
- Briggs, M.A.; Wang, C.; Day-Lewis, F.D.; Williams, K.H.; Dong, W.; Lane, J.W. Return Flows from Beaver Ponds Enhance Floodplain-to-River Metals Exchange in Alluvial Mountain Catchments. Sci. Total Environ. 2019, 685, 357–369. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Johnson, F.; Drummond, C.; Glamore, W. A New Method to Improve the Accuracy of Remotely Sensed Data for Wetland Water Balance Estimates. J. Hydrol. Reg. Stud. 2020, 29, 100689. [Google Scholar] [CrossRef]
- Scholefield, P.; Morton, D.; McShane, G.; Carrasco, L.; Whitfield, M.G.; Rowland, C.; Rose, R.; Wood, C.; Tebbs, E.; Dodd, B.; et al. Estimating Habitat Extent and Carbon Loss from an Eroded Northern Blanket Bog Using UAV Derived Imagery and Topography. Prog. Phys. Geogr. Earth Environ. 2019, 43, 282–298. [Google Scholar] [CrossRef]
- Sturdivant, E.; Lentz, E.; Thieler, E.R.; Farris, A.; Weber, K.; Remsen, D.; Miner, S.; Henderson, R. UAS-SfM for Coastal Research: Geomorphic Feature Extraction and Land Cover Classification from High-Resolution Elevation and Optical Imagery. Remote Sens. 2017, 9, 1020. [Google Scholar] [CrossRef] [Green Version]
- Furlan, L.M.; Rosolen, V.; Moreira, C.A.; Bueno, G.T.; Ferreira, M.E. The Interactive Pedological-Hydrological Processes and Environmental Sensitivity of a Tropical Isolated Wetland in the Brazilian Cerrado. SN Appl. Sci. 2021, 3, 144. [Google Scholar] [CrossRef]
- Rahman, M.M.; McDermid, G.J.; Strack, M.; Lovitt, J. A New Method to Map Groundwater Table in Peatlands Using Unmanned Aerial Vehicles. Remote Sens. 2017, 9, 1057. [Google Scholar] [CrossRef] [Green Version]
- Guo, Q.; Su, Y.; Hu, T.; Zhao, X.; Wu, F.; Li, Y.; Liu, J.; Chen, L.; Xu, G.; Lin, G.; et al. An Integrated UAV-Borne Lidar System for 3D Habitat Mapping in Three Forest Ecosystems across China. Int. J. Remote Sens. 2017, 38, 2954–2972. [Google Scholar] [CrossRef]
- Tian, J.; Wang, L.; Li, X.; Gong, H.; Shi, C.; Zhong, R.; Liu, X. Comparison of UAV and WorldView-2 Imagery for Mapping Leaf Area Index of Mangrove Forest. Int. J. Appl. Earth Obs. Geoinf. 2017, 61, 22–31. [Google Scholar] [CrossRef]
- Raeva, P.; Pavelka, K., Jr. Optimized Post-Processing of Multiple UAV Images for Forestry Inspections. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, XLIII-B1-2020, 15–19. [Google Scholar] [CrossRef]
- Kim, J.O.; Lee, J.K. UAV Application for Process Control of the Reclamation Project. J. Coast. Res. 2017, 79, 309–313. [Google Scholar] [CrossRef]
- Jensen, A.M.; Hardy, T.; McKee, M.; Chen, Y. Using a Multispectral Autonomous Unmanned Aerial Remote Sensing Platform (AggieAir) for Riparian and Wetlands Applications. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 3413–3416. [Google Scholar]
- Alvarez-Vanhard, E.; Houet, T.; Mony, C.; Lecoq, L.; Corpetti, T. Can UAVs Fill the Gap between in Situ Surveys and Satellites for Habitat Mapping? Remote Sens. Environ. 2020, 243, 111780. [Google Scholar] [CrossRef]
- Aldous, A.; Schill, S.; Raber, G.; Paiz, M.; Mambela, E.; Stévart, T. Mapping Complex Coastal Wetland Mosaics in Gabon for Informed Ecosystem Management: Use of Object-based Classification. Remote Sens. Ecol. Conserv. 2021, 7, 64–79. [Google Scholar] [CrossRef]
- Gray, P.; Ridge, J.; Poulin, S.; Seymour, A.; Schwantes, A.; Swenson, J.; Johnston, D. Integrating Drone Imagery into High Resolution Satellite Remote Sensing Assessments of Estuarine Environments. Remote Sens. 2018, 10, 1257. [Google Scholar] [CrossRef] [Green Version]
- Mohd Razali, S.; Nuruddin, A.A.; Kamarudin, N. Mapping Mangrove Density for Conservation of the Ramsar Site in Peninsular Malaysia. Int. J. Conserv. Sci. 2020, 11, 153–164. [Google Scholar]
- Baloloy, A.B.; Blanco, A.C.; Sta. Ana, R.R.C.; Nadaoka, K. Development and Application of a New Mangrove Vegetation Index (MVI) for Rapid and Accurate Mangrove Mapping. ISPRS J. Photogramm. Remote Sens. 2020, 166, 95–117. [Google Scholar] [CrossRef]
- Zhou, Z.; Yang, Y.; Chen, B. Estimating Spartina Alterniflora Fractional Vegetation Cover and Aboveground Biomass in a Coastal Wetland Using SPOT6 Satellite and UAV Data. Aquat. Bot. 2018, 144, 38–45. [Google Scholar] [CrossRef]
- Bregoli, F.; Crosato, A.; Paron, P.; McClain, M.E. Humans Reshape Wetlands: Unveiling the Last 100 Years of Morphological Changes of the Mara Wetland, Tanzania. Sci. Total Environ. 2019, 691, 896–907. [Google Scholar] [CrossRef]
- Góraj, M.; Wróblewski, C.; Ciężkowski, W.; Jóźwiak, J.; Chormański, J. Free Water Table Area Monitoring on Wetlands Using Satellite and UAV Orthophotomaps—Kampinos National Park Case Study. Meteorol. Hydrol. Water Manag. 2019, 7. [Google Scholar] [CrossRef]
- Hartfield, K.; van Leeuwen, W.J.D.; Gillan, J.K. Remotely Sensed Changes in Vegetation Cover Distribution and Groundwater along the Lower Gila River. Land 2020, 9, 326. [Google Scholar] [CrossRef]
- Blaschke, T.; Hay, G.J.; Kelly, M.; Lang, S.; Hofmann, P.; Addink, E.; Feitosa, R.Q.; van der Meer, F.; van der Werff, H.; van Coillie, F.; et al. Geographic Object-Based Image Analysis—Towards a New Paradigm. ISPRS J. Photogramm. Remote Sens. 2014, 87, 180–191. [Google Scholar] [CrossRef] [Green Version]
- Tuxen, K.; Schile, L.; Stralberg, D.; Siegel, S.; Parker, T.; Vasey, M.; Callaway, J.; Kelly, M. Mapping Changes in Tidal Wetland Vegetation Composition and Pattern across a Salinity Gradient Using High Spatial Resolution Imagery. Wetl. Ecol. Manag. 2011, 19, 141–157. [Google Scholar] [CrossRef]
- Kelly, M.; Tuxen, K.A.; Stralberg, D. Mapping Changes to Vegetation Pattern in a Restoring Wetland: Finding Pattern Metrics That Are Consistent across Spatial Scale and Time. Ecol. Indic. 2011, 11, 263–273. [Google Scholar] [CrossRef]
- Dronova, I. Object-Based Image Analysis in Wetland Research: A Review. Remote Sens. 2015, 7, 6380–6413. [Google Scholar] [CrossRef] [Green Version]
- Miller, R.L.; Fujii, R. Plant Community, Primary Productivity, and Environmental Conditions Following Wetland Re-Establishment in the Sacramento-San Joaquin Delta, California. Wetl. Ecol. Manag. 2010, 18, 1–16. [Google Scholar] [CrossRef]
- Rocha, A.V.; Goulden, M.L. Why Is Marsh Productivity so High? New Insights from Eddy Covariance and Biomass Measurements in a Typha Marsh. Agric. For. Meteorol. 2009, 149, 159–168. [Google Scholar] [CrossRef] [Green Version]
- Joshi, C.; De Leeuw, J.; Van Duren, I. Remote Sensing and GIS Applications for Mapping and Spatial Modeling of Invasive Species. Proceedings of ISPRS 2004, 35, p.B7. [Google Scholar]
- Kislik, C.; Genzoli, L.; Lyons, A.; Kelly, M. Application of UAV Imagery to Detect and Quantify Submerged Filamentous Algae and Rooted Macrophytes in a Non-Wadeable River. Remote Sens. 2020, 12, 3332. [Google Scholar] [CrossRef]
- Taddia, Y.; Russo, P.; Lovo, S.; Pellegrinelli, A. Multispectral UAV Monitoring of Submerged Seaweed in Shallow Water. Appl. Geomat. 2020, 12, 19–34. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Yésou, H. Remote Sensing of Floodpath Lakes and Wetlands: A Challenging Frontier in the Monitoring of Changing Environments. Remote Sens. 2018, 10, 1955. [Google Scholar] [CrossRef] [Green Version]
- Hardin, P.J.; Jensen, R.R. Small-Scale Unmanned Aerial Vehicles in Environmental Remote Sensing: Challenges and Opportunities. GIScience Remote Sens. 2011, 48, 99–111. [Google Scholar] [CrossRef]
- Nex, F.; Remondino, F. UAV for 3D Mapping Applications: A Review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Stöcker, C.; Bennett, R.; Nex, F.; Gerke, M.; Zevenbergen, J. Review of the Current State of UAV Regulations. Remote Sens. 2017, 9, 459. [Google Scholar] [CrossRef] [Green Version]
- Allan, B.M.; Ierodiaconou, D.; Nimmo, D.G.; Herbert, M.; Ritchie, E.G. Free as a Drone: Ecologists Can Add UAVs to Their Toolbox. Front. Ecol. Environ. 2015, 13, 354–355. [Google Scholar] [CrossRef]
- Evans, A.D.; Gardner, K.H.; Greenwood, S.; Pruitt, B. Exploring the Utility of Small Unmanned Aerial System Products in Remote Visual Stream Ecological Assessment. Restor. Ecol. 2020, 28, 1431–1444. [Google Scholar] [CrossRef]
- Vousdoukas, M.; Pennucci, G.; Holman, R.; Conley, D. A Semi Automatic Technique for Rapid Environmental Assessment in the Coastal Zone Using Small Unmanned Aerial Vehicles (SUAV). J. Coast. Res. 2011, SI64, 1755–1759. [Google Scholar]
- Tuxen, K.; Kelly, M. Multi-scale functional mapping of tidal wetlands: An object-based approach. In Object-based Image Analysis: Spatial Concepts for Knowledge Driven remote Sensing Applications; Blaschke, T., Lang, S., Hay, G., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 412–415. [Google Scholar]
- Zhang, X.; Xiao, P.; Feng, X. Object-Specific Optimization of Hierarchical Multiscale Segmentations for High-Spatial Resolution Remote Sensing Images. ISPRS J. Photogramm. Remote Sens. 2020, 159, 308–321. [Google Scholar] [CrossRef]
- Dao, P.D.; Mantripragada, K.; He, Y.; Qureshi, F.Z. Improving Hyperspectral Image Segmentation by Applying Inverse Noise Weighting and Outlier Removal for Optimal Scale Selection. ISPRS J. Photogramm. Remote Sens. 2021, 171, 348–366. [Google Scholar] [CrossRef]
- Dragut, L.; Csillik, O.; Eisank, C.; Tiede, D. Automated Parameterisation for Multi-Scale Image Segmentation on Multiple Layers. ISPRS J. Photogramm. Remote Sens. 2014, 88, 119–127. [Google Scholar] [CrossRef] [Green Version]
- Hu, T.; Sun, X.; Su, Y.; Guan, H.; Sun, Q.; Kelly, M.; Guo, Q. Development and Performance Evaluation of a Very Low-Cost UAV-Lidar System for Forestry Applications. Remote Sens. 2020, 13, 77. [Google Scholar] [CrossRef]
- Guo, Q.; Su, Y.; Hu, T.; Guan, H.; Jin, S.; Zhang, J.; Zhao, X.; Xu, K.; Wei, D.; Kelly, M.; et al. Lidar Boosts 3D Ecological Observations and Modelings: A Review and Perspective. IEEE Geosci. Remote Sens. Mag. 2021, 9, 232–257. [Google Scholar] [CrossRef]
- Easterday, K.; Kislik, C.; Dawson, T.; Hogan, S.; Kelly, M. Remotely Sensed Water Limitation in Vegetation: Insights from an Experiment with Unmanned Aerial Vehicles (UAVs). Remote Sens. 2019, 11, 1853. [Google Scholar] [CrossRef] [Green Version]
- Dronova, I.; Taddeo, S.; Hemes, K.S.; Knox, S.H.; Valach, A.; Oikawa, P.Y.; Kasak, K.; Baldocchi, D.D. Remotely Sensed Phenological Heterogeneity of Restored Wetlands: Linking Vegetation Structure and Function. Agric. For. Meteorol. 2021, 296, 108215. [Google Scholar] [CrossRef]
- McNicol, G.; Sturtevant, C.S.; Knox, S.H.; Dronova, I.; Baldocchi, D.D.; Silver, W.L. Effects of Seasonality, Transport Pathway, and Spatial Structure on Greenhouse Gas Fluxes in a Restored Wetland. Glob. Change Biol. 2017, 23, 2768–2782. [Google Scholar] [CrossRef] [Green Version]
- Kearney, M.S.; Stutzer, D.; Turpie, K.; Stevenson, J.C. The Effects of Tidal Inundation on the Reflectance Characteristics of Coastal Marsh Vegetation. J. Coast. Res. 2009, 25, 1177–1186. [Google Scholar] [CrossRef]
- Wilkinson, M.D.; Dumontier, M.; Aalbersberg, I.J.; Appleton, G.; Axton, M.; Baak, A.; Blomberg, N.; Boiten, J.-W.; da Silva Santos, L.B.; Bourne, P.E.; et al. The FAIR Guiding Principles for Scientific Data Management and Stewardship. Sci. Data 2016, 3, 160018. [Google Scholar] [CrossRef] [Green Version]
- Wyngaard, J.; Barbieri, L.; Thomer, A.; Adams, J.; Sullivan, D.; Crosby, C.; Parr, C.; Klump, J.; Raj Shrestha, S.; Bell, T. Emergent Challenges for Science SUAS Data Management: Fairness through Community Engagement and Best Practices Development. Remote Sens. 2019, 11, 1797. [Google Scholar] [CrossRef] [Green Version]
- Wulder, M.A.; Masek, J.G.; Cohen, W.B.; Loveland, T.R.; Woodcock, C.E. Opening the Archive: How Free Data Has Enabled the Science and Monitoring Promise of Landsat. Remote Sens. Environ. 2012, 122, 2–10. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Primary Goal of the UAV Application | Primary Method in the Application | |||
|---|---|---|---|---|
| Mapping Vegetation and Land Cover | Modeling Biophysical Parameters of Ecosystem or Vegetation | Mapping Change Over Time | Development of Novel Methods | |
| Vegetation inventories | [24,29,40,41,61,69,70,73,77,80,81,82,83,84,85] | [23,33,53,54,62,67,86,87] | [88,89,90,91,92,93] | [5,14,15,71,79,94,95] |
| Wildlife habitat and population inventories | [96,97,98,99] | [36] | [100] | [63,101,102,103,104] |
| Wetland ecological status and health indicators | [27,34,42,47,48,64,105] | [35,106,107] | [108,109,110,111] | [7] |
| Tracking biological invasions | [25,68,74,112,113,114,115] | [116] | - | [13,55] |
| Restoration and management outcomes | [10,11,56,57,117,118,119] | [120,121] | [8,9,43,122] | [44,123] |
| Abiotic surveys | [32,45,58,65,124,125,126,127] | [28,128] | [4,129,130] | [66,131] |
| Data and methods for wider use | [76,132] | [133,134,135] | [78] | [6,136,137] |
| Ground reference | [72,75,138,139,140,141,142] | [143] | [144,145,146] | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dronova, I.; Kislik, C.; Dinh, Z.; Kelly, M. A Review of Unoccupied Aerial Vehicle Use in Wetland Applications: Emerging Opportunities in Approach, Technology, and Data. Drones 2021, 5, 45. https://0-doi-org.brum.beds.ac.uk/10.3390/drones5020045
Dronova I, Kislik C, Dinh Z, Kelly M. A Review of Unoccupied Aerial Vehicle Use in Wetland Applications: Emerging Opportunities in Approach, Technology, and Data. Drones. 2021; 5(2):45. https://0-doi-org.brum.beds.ac.uk/10.3390/drones5020045
Chicago/Turabian StyleDronova, Iryna, Chippie Kislik, Zack Dinh, and Maggi Kelly. 2021. "A Review of Unoccupied Aerial Vehicle Use in Wetland Applications: Emerging Opportunities in Approach, Technology, and Data" Drones 5, no. 2: 45. https://0-doi-org.brum.beds.ac.uk/10.3390/drones5020045