Large-Scale Automatic Vessel Monitoring Based on Dual-Polarization Sentinel-1 and AIS Data

 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
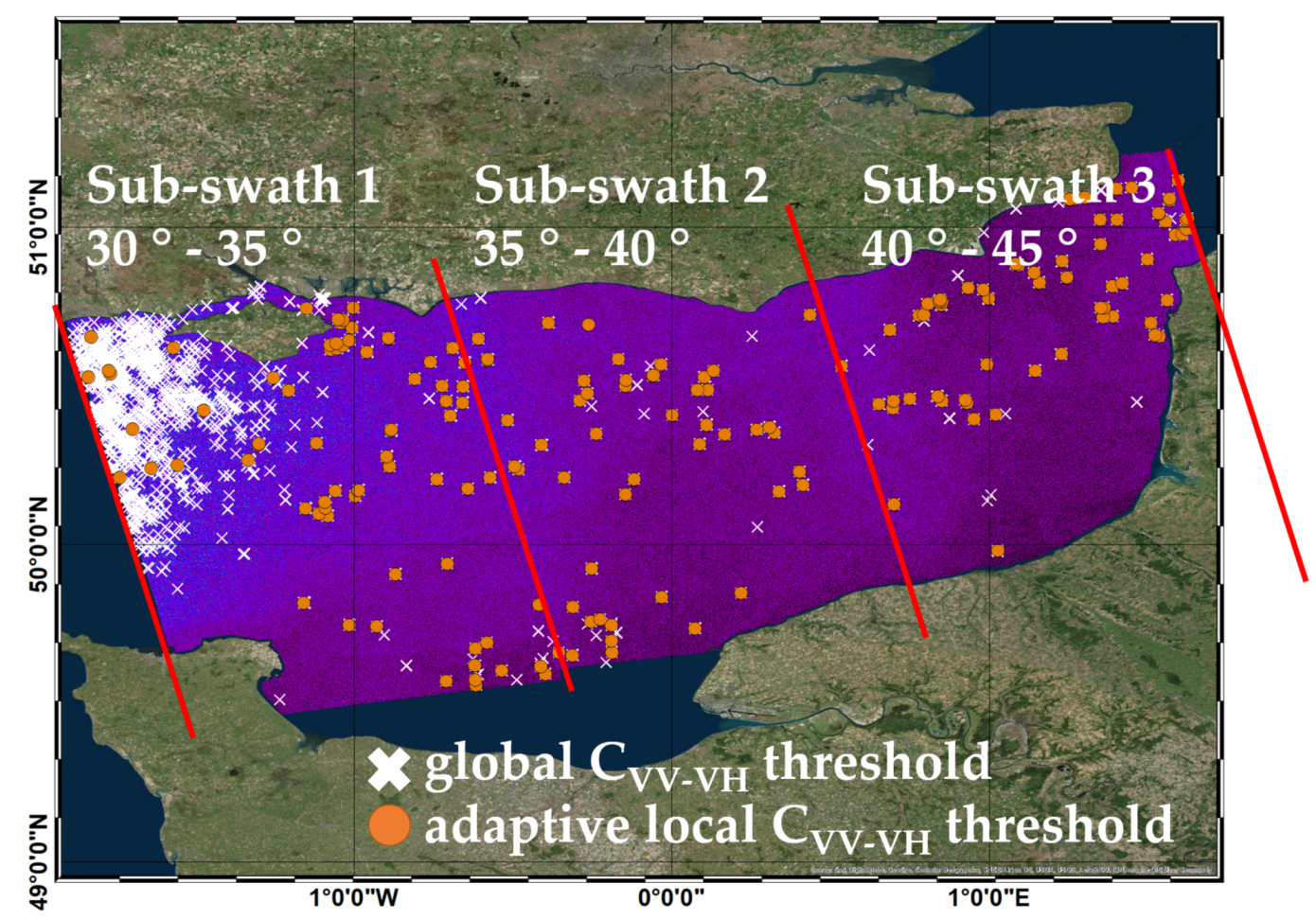
2.1. Sentinel-1 Dual-Polarization Characteristics
2.2. Dual-Polarization Ship Detection Algorithm
| Algorithm 1:-based detector. |
 |
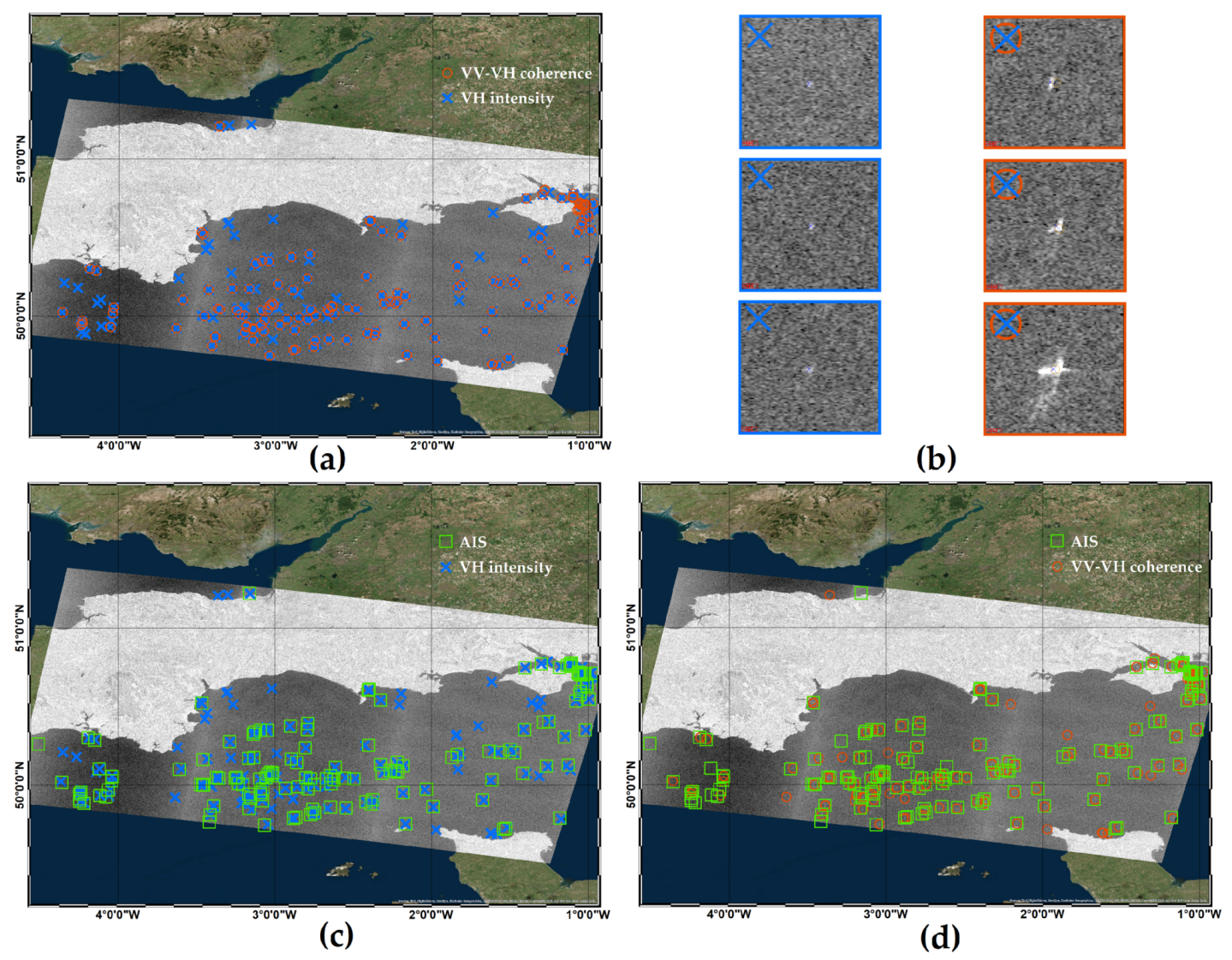
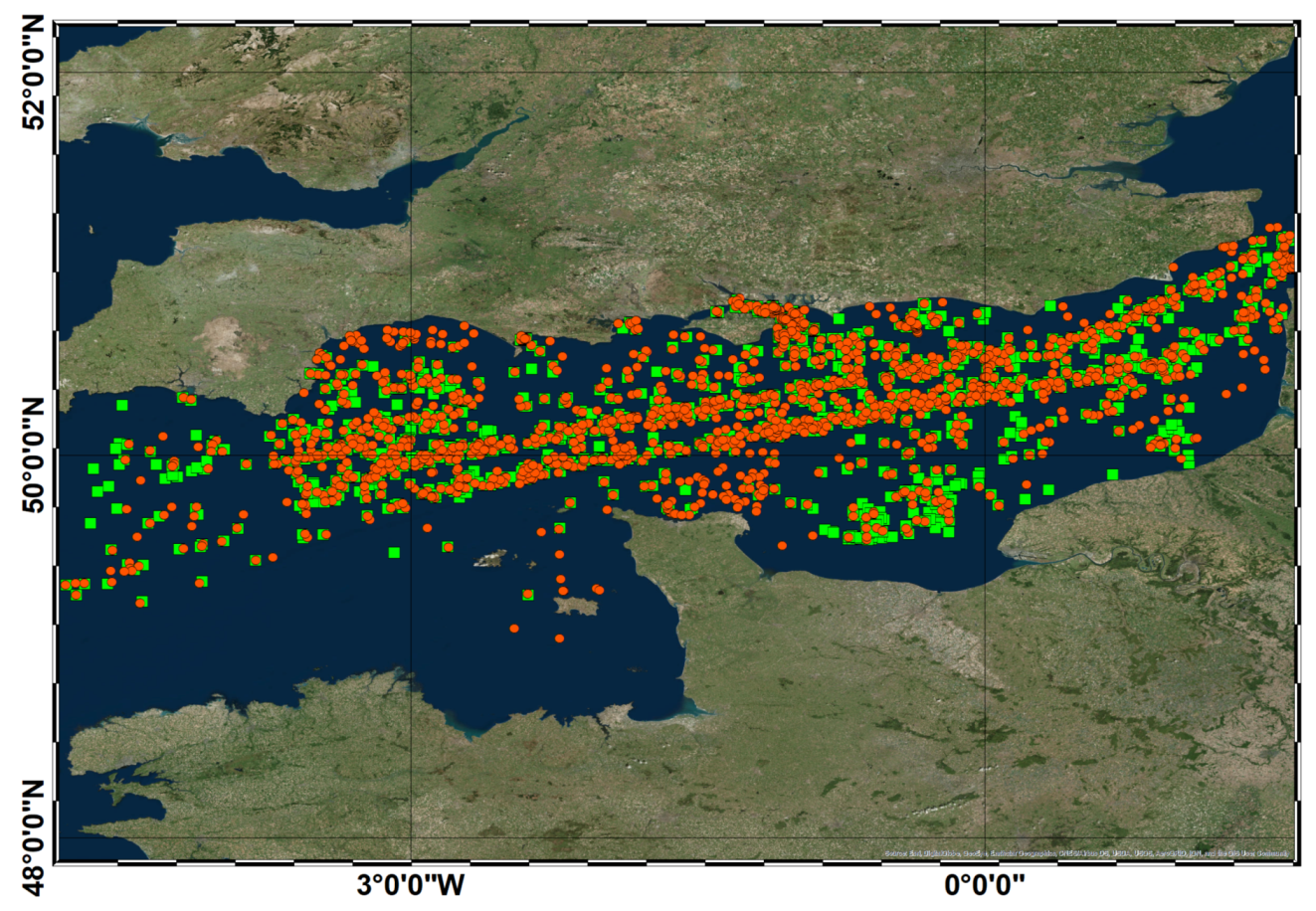
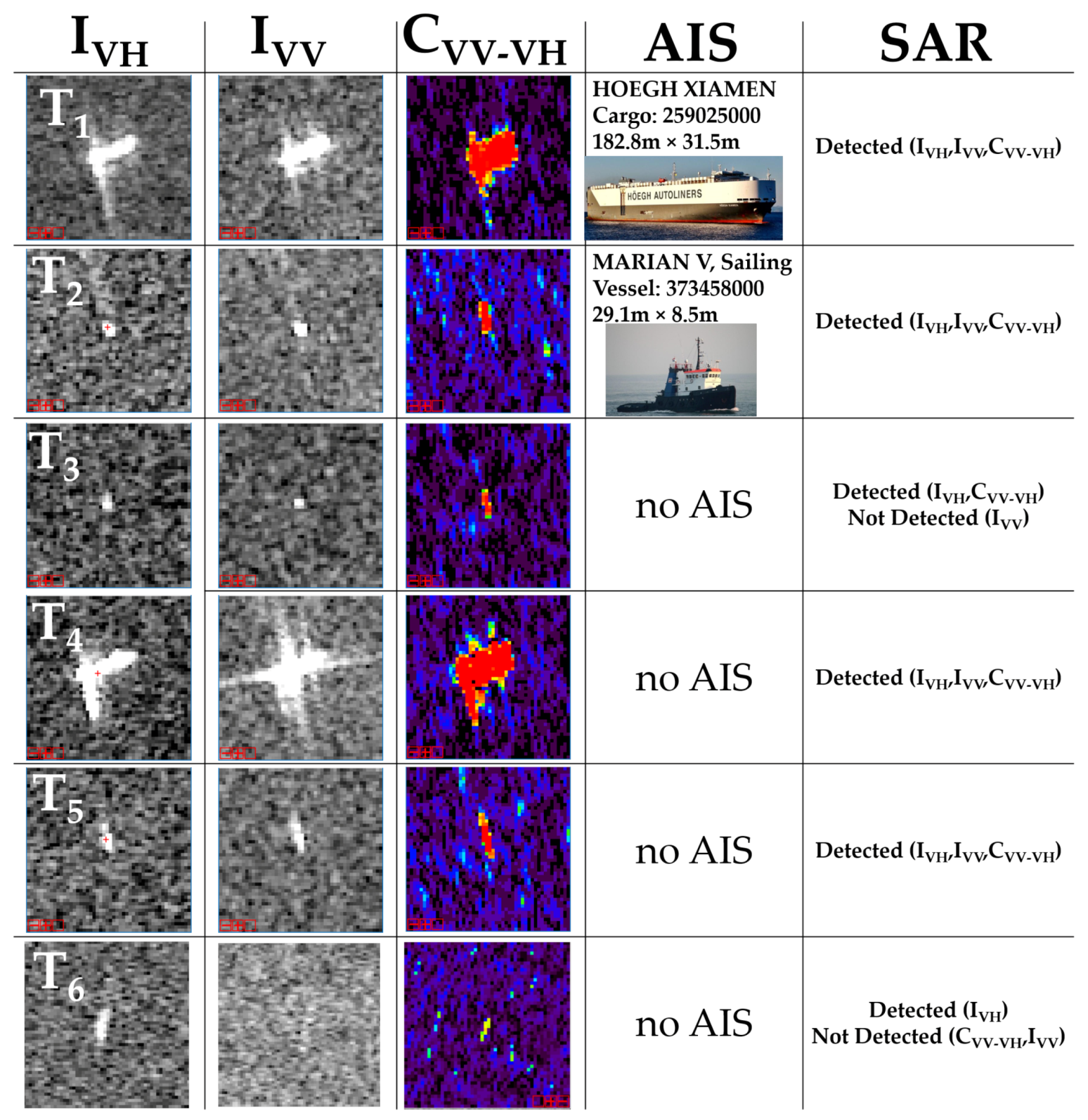
2.3. SAR and AIS Data Comparison
| Algorithm 2: Interpolation of automatic identification system (AIS) data flows. |
 |
3. Results
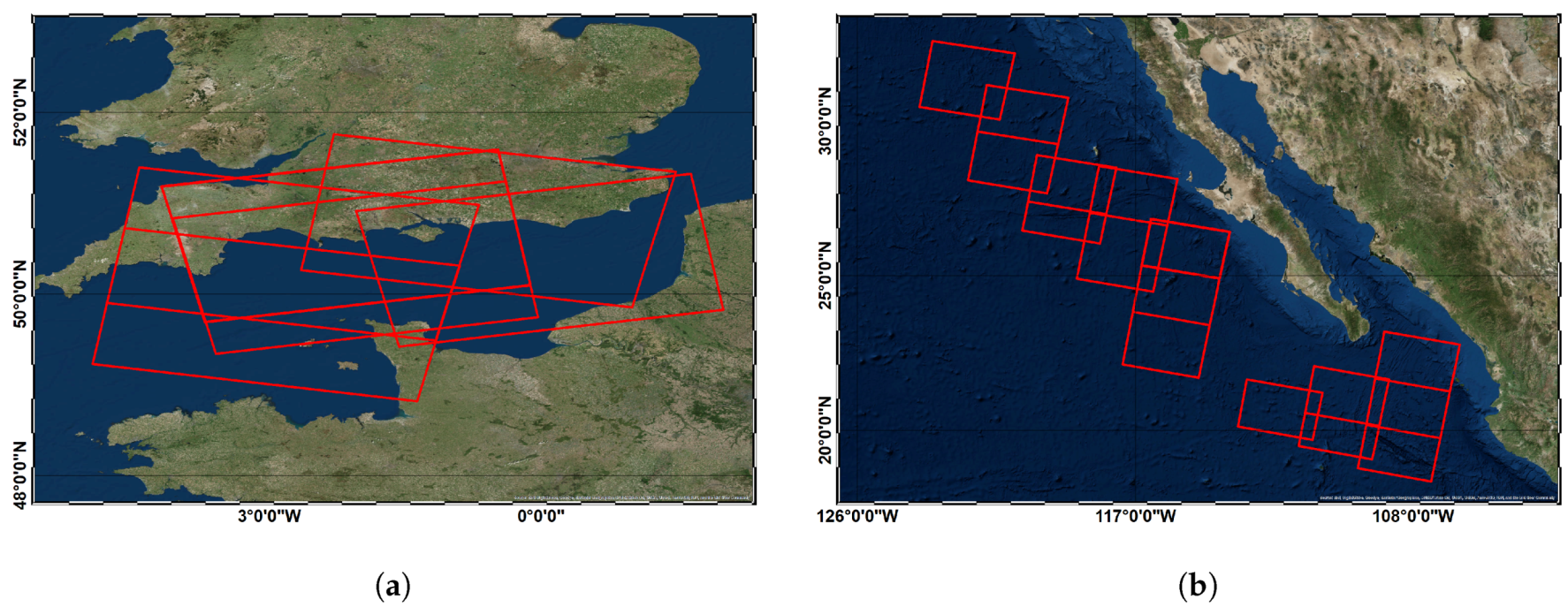
3.1. Sentinel-1 and AIS Datasets, Benchmarking Methods
3.2. English Channel Test Case
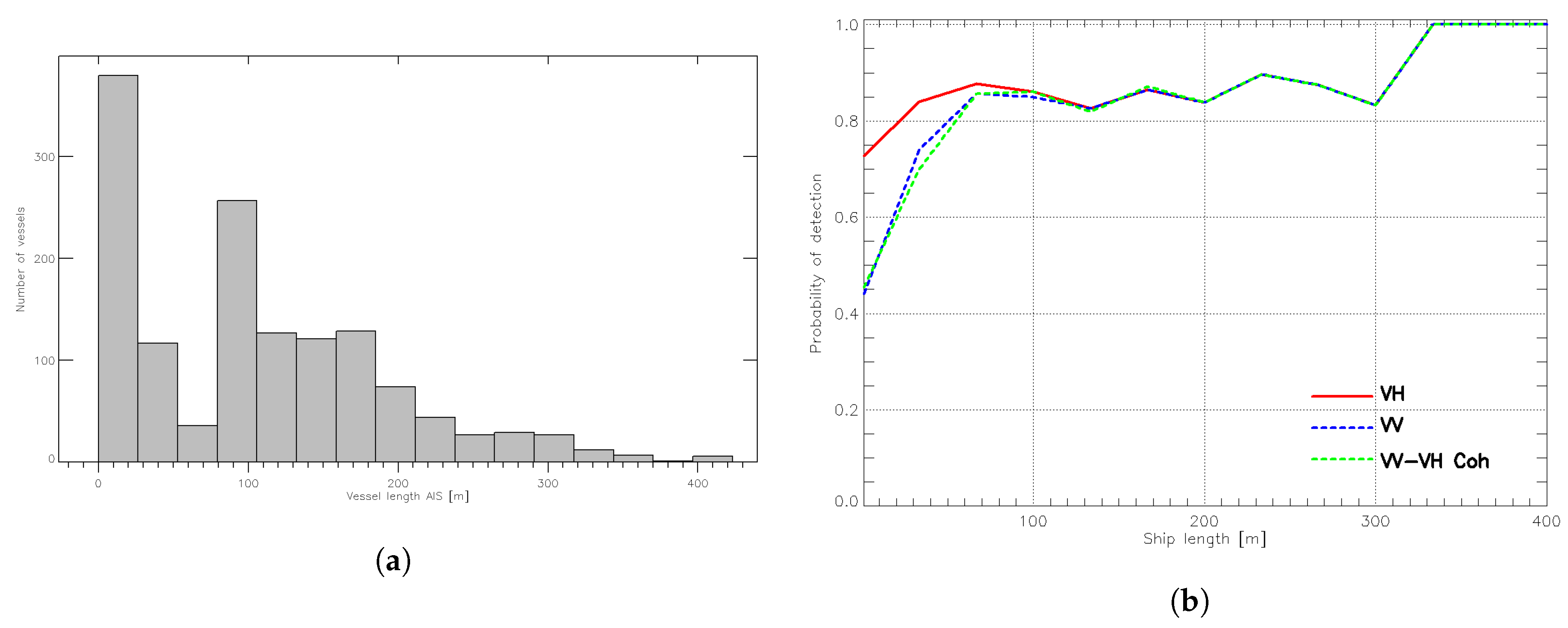
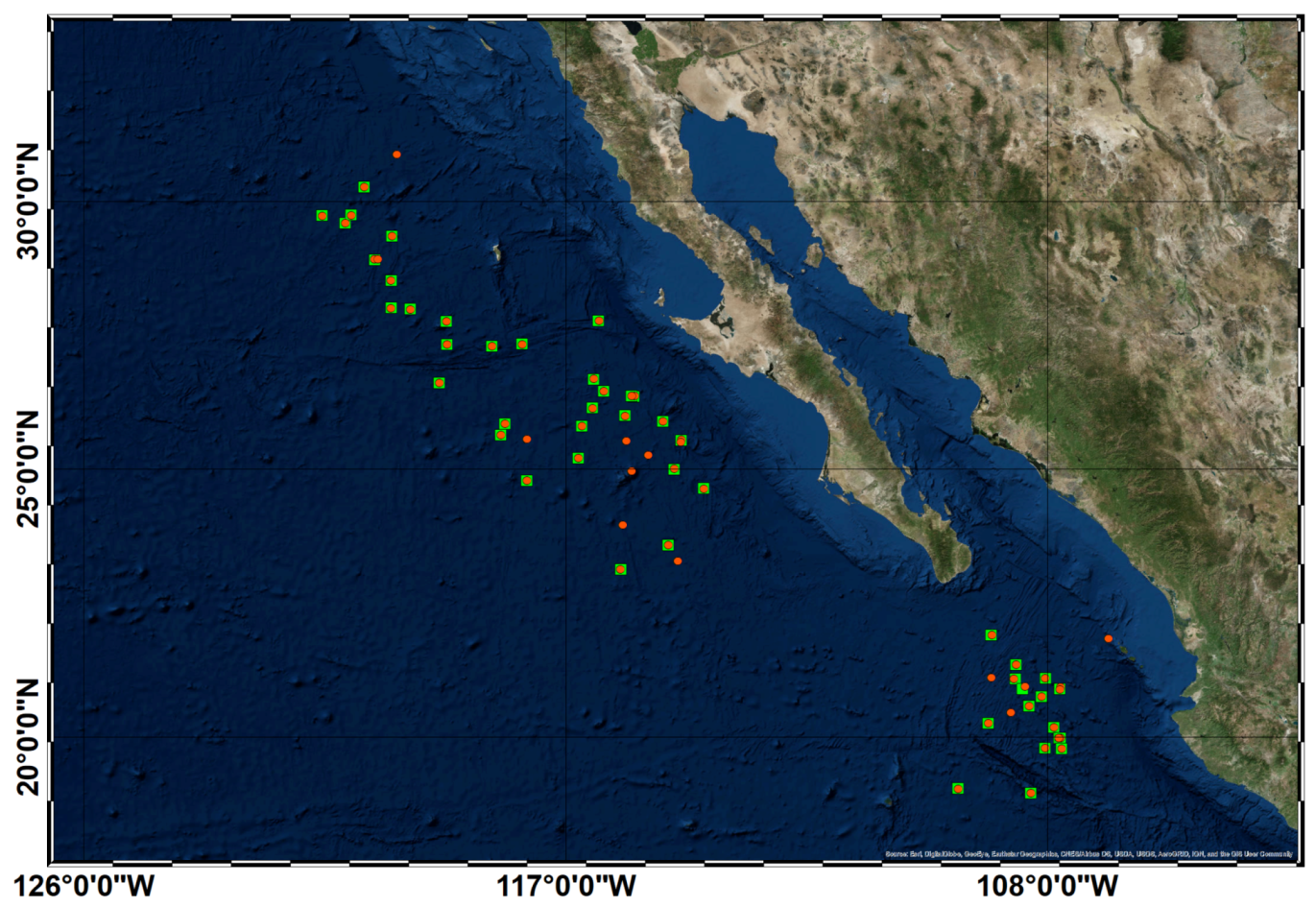
3.3. Mexico Test Case
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- International Maritime Organization. Introduction to International Maritime Organization. 2019. Available online: http://www.imo.org/ (accessed on 28 February 2019).
- Denis, G.; Claverie, A.; Pasco, X.; Darnis, J.P.; de Maupeou, B.; Lafaye, M.; Morel, E. Towards disruptions in Earth observation? New Earth Observation systems and markets evolution: Possible scenarios and impacts. Acta Astronaut. 2017, 137, 415–433. [Google Scholar] [CrossRef]
- Hajduch, G.; Kerbaol, V.; de Joux, R. Ship Detection: from Processing to Instrument Characterization. In Proceedings of the SeaSAR 2008 Workshop, Frascati, Italy, 21–25 January 2008. [Google Scholar]
- Potin, P.; Rosich, B.; Miranda, N.; Grimont, P.; Shurmer, I.; Connell, A.; Krassenburg, M.; Gratadour, J.B. Sentinel-1 Constellation Mission Operations Status. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 1547–1550. [Google Scholar]
- Greidanus, H.; Alvarez, M.; Santamaria, C.; Thoorens, F.X.; Kourti, N.; Argentieri, P. The SUMO Ship Detector Algorithm for Satellite Radar Images. Remote Sens. 2017, 9, 246. [Google Scholar] [CrossRef]
- Buckreuss, S.; Schättler, B.; Fritz, T.; Mittermayer, J.; Kahle, R.; Maurer, E.; Böer, J.; Bachmann, M.; Mrowka, F.; Schwarz, E.; et al. Ten Years of TerraSAR-X Operations. Remote Sens. 2018, 10, 873. [Google Scholar] [CrossRef]
- Crisp, D.J. The State-of-the-Art in Ship Detection in Synthetic Aperture Radar Imagery; Technical Report; Intelligence, Surveillance and Reconnaissance Division Information Sciences Laboratory: Edinburgh, South Australia, Australia, 2004. [Google Scholar]
- El-Darymli, K.; Gill, E.W.; McGuire, P.; Power, D.; Moloney, C. Target detection in synthetic aperture radar imagery: A state-of-the-art survey. J. Appl. Remote Sens. SPIE 2013, 7, 071598. [Google Scholar] [CrossRef]
- Gao, G. Statistical Modeling of SAR Images: A Survey. Sensors 2010, 10, 775–795. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kuruoglu, E.E.; Zerubia, J. Modeling SAR images with a generalization of the Rayleigh distribution. IEEE Trans. Image Process. 2004, 13, 527–533. [Google Scholar] [CrossRef]
- Li, H.; Hong, W.; Wu, Y.; Fan, P.Z. On the Empirical-Statistical Modeling of SAR Images With Generalized Gamma Distribution. IEEE J. Sel. Top. Signal Process. 2011, 5, 386–397. [Google Scholar]
- Sijbers, J.; den Dekker, A.J.; Scheunders, P.; Dyck, D.V. Maximum-likelihood estimation of Rician distribution parameters. IEEE Trans. Med. Imaging 1998, 17, 357–361. [Google Scholar] [CrossRef] [Green Version]
- Xie, H.; Pierce, L.; Ulaby, F. Statistical properties of logarithmically transformed speckle. IEEE Trans. Geosci. Remote Sens. 2002, 40, 721–727. [Google Scholar] [CrossRef]
- Eldhuset, K. An automatic ship and ship wake detection system for spaceborne SAR images in coastal regions. IEEE Trans. Geosci. Remote Sens. 1996, 34, 1010–1019. [Google Scholar] [CrossRef]
- Alberola-Lopez, C.; Casar-Corredera, J.; de Miguel-Vela, G. Object CFAR detection in gamma-distributed textured-background images. IEE Proc. Vis. Image Signal Process. 1999, 146, 130–136. [Google Scholar] [CrossRef]
- Magraner, E.; Bertaux, N.; Rex0301frex0301gier, P. Detection in Gamma-Distributed Nonhomogeneous Backgrounds. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1127–1139. [Google Scholar] [CrossRef]
- Armstrong, B.; Griffiths, H. CFAR detection of fluctuating targets in spatially correlated K-distributed clutter. IEE Proc. Vis. Image Signal Process. 1991, 138, 139–152. [Google Scholar] [CrossRef]
- Xing, X.; Ji, K.; Zou, H.; Sun, J.; Zhou, S. High resolution SAR imagery ship detection based on EXS-C-CFAR in Alpha-stable clutters. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 316–319. [Google Scholar]
- Pappas, O.A.; Achim, A.; Bull, D.R. Superpixel-Level CFAR Detectors for Ship Detection in SAR Imagery. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1397–1401. [Google Scholar] [CrossRef]
- Tao, D.; Anfinsen, S.N.; Brekke, C. Robust CFAR Detector Based on Truncated Statistics in Multiple-Target Situations. IEEE Trans. Geosci. Remote Sens. 2016, 54, 117–134. [Google Scholar] [CrossRef]
- Gao, G. A Parzen-Window-Kernel-Based CFAR Algorithm for Ship Detection in SAR Images. IEEE Geosci. Remote Sens. Lett. 2011, 8, 557–561. [Google Scholar] [CrossRef]
- Pelich, R.; Longepe, N.; Mercier, G.; Hajduch, G.; Garello, R. AIS-Based Evaluation of Target Detectors and SAR Sensors Characteristics for Maritime Surveillance. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 8, 3892–3901. [Google Scholar] [CrossRef]
- Tello, M.; López-Martínez, C.; Mallorqui, J.J. A Novel Algorithm for Ship Detection in SAR Imagery Based on the Wavelet Transform. IEEE Geosci. Remote Sens. Lett. 2005, 2, 201–205. [Google Scholar] [CrossRef] [Green Version]
- Arii, M. Improvement of ship-sea clutter ratio of SAR imagery using standard deviation filter. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 632–635. [Google Scholar]
- Kang, M.; Ji, K.; Leng, X.; Lin, Z. Contextual Region-Based Convolutional Neural Network with Multilayer Fusion for SAR Ship Detection. Remote Sens. 2017, 9, 860. [Google Scholar] [CrossRef]
- Salembier, P.; Liesegang, S.; López-Martínez, C. Ship Detection in SAR Images Based on Maxtree Representation and Graph Signal Processing. IEEE Trans. Geosci. Remote Sens. 2018, 57, 2709–2724. [Google Scholar] [CrossRef]
- Hwang, J.I.; Jung, H.S. Automatic Ship Detection Using the Artificial Neural Network and Support Vector Machine from X-Band Sar Satellite Images. Remote Sens. 2018, 10, 1799. [Google Scholar] [CrossRef]
- Snoeij, P.; Attema, E.; Davidson, M.W.J.; Duesmann, B.; Floury, N.; Levrini, G.; Rommen, B.; Rosich, B. Sentinel-1 radar mission: Status and performance. IEEE Aerosp. Electron. Syst. Mag. 2010, 25, 32–39. [Google Scholar] [CrossRef]
- Virelli, M.; Coletta, A.; Battagliere, M.L. ASI COSMO-SkyMed: Mission Overview and Data Exploitation. IEEE Geosci. Remote Sens. Mag. 2014, 2, 64–66. [Google Scholar] [CrossRef]
- Faller, N.; Weber, M. TerraSAR-X and TanDEM-X: Revolution in spaceborne radar. In Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007; pp. 4924–4928. [Google Scholar]
- Zhang, T.; Marino, A.; Xiong, H.; Yu, W. A Ship Detector Applying Principal Component Analysis to the Polarimetric Notch Filter. Remote Sens. 2018, 10, 948. [Google Scholar] [CrossRef]
- Marino, A.; Cloude, S.; Woodhouse, I.H. A Polarimetric Target Detector Using the Huynen Fork. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2357–2366. [Google Scholar] [CrossRef] [Green Version]
- Velotto, D.; Nunziata, F.; Migliaccio, M.; Lehner, S. Dual-Polarimetric TerraSAR-X SAR Data for Target at Sea Observation. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1114–1118. [Google Scholar] [CrossRef]
- Velotto, D.; Bentes, C.; Tings, B.; Lehner, S. First Comparison of Sentinel-1 and TerraSAR-X Data in the Framework of Maritime Targets Detection: South Italy Case. IEEE J. Ocean. Eng. 2016, 41, 993–1006. [Google Scholar] [CrossRef]
- Touzi, R.; Charbonneau, F.; Hawkins, R.K.; Vachon, P.W. Ship detection and characterization using polarimetric SAR. Can. J. Remote Sens. 2004, 30, 552–559. [Google Scholar] [CrossRef]
- Hu, C.; Ferro-Famil, L.; Kuang, G. Ship Discrimination Using Polarimetric SAR Data and Coherent Time-Frequency Analysis. Remote Sens. 2013, 5, 6899–6920. [Google Scholar] [CrossRef] [Green Version]
- Touzi, R.; Hurley, J.; Vachon, P.W. Optimization of the Degree of Polarization for Enhanced Ship Detection Using Polarimetric RADARSAT-2. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5403–5424. [Google Scholar] [CrossRef]
- Pelich, R.; Mercier, N.L.G.; Hajduch, G.; Garello, R. Performance evaluation of Sentinel-1 data in SAR ship detection. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015. [Google Scholar]
- Santamaria, C.; Alvarez, M.; Greidanus, H.; Syrris, V.; Soille, P.; Argentieri, P. Mass Processing of Sentinel-1 Images for Maritime Surveillance. Remote Sens. 2017, 9, 678. [Google Scholar] [CrossRef]
- Huang, L.; Liu, B.; Li, B.; Guo, W.; Yu, W.; Zhang, Z.; Yu, W. OpenSARShip: A Dataset Dedicated to Sentinel-1 Ship Interpretation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 195–208. [Google Scholar] [CrossRef]
- Nunziata, F.; Migliaccio, M.; Brown, C.E. Reflection Symmetry for Polarimetric Observation of Man-Made Metallic Targets at Sea. IEEE J. Ocean. Eng. 2012, 37, 384–394. [Google Scholar] [CrossRef]
- European Space Agency. Thematic Exploitation Platform. 2019. Available online: https://tep.eo.esa.int/ (accessed on 28 February 2019).
- European Commission. Functional Requirements for the Copernicus Distribution Services and the Data and Information Access Services (DIAS). 2016. Available online: http://ec.europa.eu/DocsRoom/documents/20521/attachments/1/translations/en/renditions/pdf (accessed on 28 February 2019).
- Lee, J.S.; Pottier, E. Polarimetric Radar Imaging: From Basics to Applications; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Raney, R.K.; Spudis, P.D.; Bussey, D.B.J.; Crusan, J.; Jensen, J.R.; Marinelli, W.; McKerracher, P.; Neish, C.; Palsetia, M.R.; Schulze, R.; et al. The Lunar Mini-RF Radars: Hybrid Polarimetric Architecture and Initial Results. Proc. IEEE 2011, 99, 808–823. [Google Scholar] [CrossRef]
- Arii, M. Ship detection from full polarimetric SAR data at different incidence angles. In Proceedings of the 2011 3rd International Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Seoul, Korea, 26–30 September 2011; pp. 1–4. [Google Scholar]
- Touzi, R.; Vachon, P.W.; Wolfe, J. Requirement on Antenna Cross-Polarization Isolation for the Operational Use of C-Band SAR Constellations in Maritime Surveillance. IEEE Geosci. Remote Sens. Lett. 2010, 7, 861–865. [Google Scholar] [CrossRef]
- Liu, C.D.; Vachon, P.W.; English, R.A.; Sandirasegaram, N.M. Ship Detection Using RADARSAT-2 Fine Quad Mode and Simulated Compact Polarimetry Data; Technical Memorandum; Defence R&D Canada: Ottawa, ON, Canada, 2010. [Google Scholar]
- Margarit, G.; Mallorquí, J.; Fortuny-Guasch, J.; López-Martínez, C. Phenomenological Vessel Scattering Study Based on Simulated Inverse SAR Imagery. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1212–1223. [Google Scholar] [CrossRef]
- Margarit, G.; Mallorquí, J.; Fortuny-Guasch, J.; López-Martínez, C. Exploitation of Ship Scattering in Polarimetric SAR for an Improved Classification Under High Clutter Conditions. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1224–1235. [Google Scholar] [CrossRef]
- Yin, J.; Yang, J.; Zhou, Z.S.; Song, J. The Extended Bragg Scattering Model-Based Method for Ship and Oil-Spill Observation Using Compact Polarimetric SAR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3760–3772. [Google Scholar] [CrossRef]
- Touzi, R.; Lopes, A.; Bruniquel, J.; Vachon, P. Coherence estimation for SAR imagery. IEEE Trans. Geosci. Remote Sens. 1999, 37, 135–149. [Google Scholar] [CrossRef]
- Topouzelis, K.N.; Singha, S. Incidence angle Normalization of Wide Swath SAR Data for Oceanographic Applications. Open Geosci. 2016, 8, 450–464. [Google Scholar] [CrossRef]
- Huang, L.; Liu, B.; Li, X.; Zhang, Z.; Yu, W. Technical Evaluation of Sentinel-1 IW Mode Cross-Pol Radar Backscattering from the Ocean Surface in Moderate Wind Condition. Remote Sens. 2017, 9, 854. [Google Scholar] [CrossRef]
- Lee, J.S.; Grunes, M.; de Grandi, G. Polarimetric SAR speckle filtering and its implication for classification. IEEE Trans. Geosci. Remote Sens. 1999, 37, 2363–2373. [Google Scholar]
- Makhoul, E.; López-Martínez, C.; Broquetas, A. Exploiting Polarimetric TerraSAR-X Data for Sea Clutter Characterization. IEEE Trans. Geosci. Remote Sens. 2016, 54, 358–372. [Google Scholar] [CrossRef]
- Frery, A.; Muller, H.J.; Yanasse, C.; Sant’Anna, S. A model for extremely heterogeneous clutter. IEEE Trans. Geosci. Remote Sens. 1997, 35, 648–659. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.S.; Hoppel, K.; Mango, S.; Miller, A. Intensity and phase statistics of multilook polarimetric and interferometric SAR imagery. IEEE Trans. Geosci. Remote Sens. 1994, 32, 1017–1028. [Google Scholar]
- Tough, R.J.A.; Blacknell, D.; Quegan, S. A Statistical Description of Polarimetric and Interferometric Synthetic Aperture Radar Data. Proc. R. Soc. A 1995, 449, 567–589. [Google Scholar] [CrossRef]
- Smestad, B.B.; Asbjørnslett, B.E.; Rødseth, Ø.J. Expanding the Possibilities of AIS Data with Heuristics. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2017, 11, 279–286. [Google Scholar] [CrossRef]
- Tetreault, B.J. Use of the Automatic Identification System (AIS) for maritime domain awareness (MDA). In Proceedings of the OCEANS 2005 MTS/IEEE, Washington, DC, USA, 17–23 September 2005; Volume 2, pp. 1590–1594. [Google Scholar]
- Mazzarella, F.; Arguedas, V.F.; Vespe, M. Knowledge-based vessel position prediction using historical AIS data. In Proceedings of the 2015 Sensor Data Fusion: Trends, Solutions, Applications (SDF), Bonn, Germany, 6–8 October 2015; pp. 1–6. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case Study | No. of Images | SLC Resolution [m] | Polarization | Sensing Dates |
|---|---|---|---|---|
| English Channel | 10 | 5 × 20 (rg × az) | VV-VH | October–November 2017 |
| Mexican marine areas | 20 | October 2018 |
| Case Study | AIS ∩ SAR | AIS with no SAR | SAR with no AIS | AIS ∪ SAR | |
|---|---|---|---|---|---|
| English Channel | nb. of vessels | 998 | 393 | 713 | 2104 |
| Mexico | 51 | 0 | 12 | 63 |
| Case Study | Detection Method | ||||
|---|---|---|---|---|---|
| & & | |||||
| English Channel | nb. of vessels | 1711 | 1960 | 1815 | 1420 |
| Mexico | 63 | 80 | 92 | 56 | |
| Case Study | AIS ∩ SAR | AIS with No SAR | SAR with No AIS | AIS ∪ SAR (Vessel nb) | |
|---|---|---|---|---|---|
| % wrt AIS ∪ SAR | 48% | 18% | 34% | 2104 | |
| CFAR | 51% | 12% | 37% | 2215 | |
| CFAR | 46% | 17% | 37% | 2208 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pelich, R.; Chini, M.; Hostache, R.; Matgen, P.; Lopez-Martinez, C.; Nuevo, M.; Ries, P.; Eiden, G. Large-Scale Automatic Vessel Monitoring Based on Dual-Polarization Sentinel-1 and AIS Data. Remote Sens. 2019, 11, 1078. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11091078
Pelich R, Chini M, Hostache R, Matgen P, Lopez-Martinez C, Nuevo M, Ries P, Eiden G. Large-Scale Automatic Vessel Monitoring Based on Dual-Polarization Sentinel-1 and AIS Data. Remote Sensing. 2019; 11(9):1078. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11091078
Chicago/Turabian StylePelich, Ramona, Marco Chini, Renaud Hostache, Patrick Matgen, Carlos Lopez-Martinez, Miguel Nuevo, Philippe Ries, and Gerd Eiden. 2019. "Large-Scale Automatic Vessel Monitoring Based on Dual-Polarization Sentinel-1 and AIS Data" Remote Sensing 11, no. 9: 1078. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11091078