
Variable Coefficient Exact Solutions for Some Nonlinear Conformable Partial Differential Equations Using an Auxiliary Equation Method



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- The conformable time (2 + 1)-dimensional Kadomtsev–Petviashvili equation of order is given aswhere is the conformable partial derivative of the dependent variable with respect to the independent variable t of order and is a positive real number. If Equation (1) becomes the integer order (2 + 1)-dimensional Kadomtsev–Petviashvili equation [23,24,25] describing the evolution of nonlinear, long waves of small amplitudes with slow dependence on the transverse coordinate. In physics, this equation often provides multi-soliton solutions.
- The conformable space-time (2 + 1)-dimensional Boussinesq equation isAll of the partial derivatives appearing in Equation (2) are the conformable partial derivatives. When Equation (2) turns out to be the integer order (2 + 1)-dimensional Boussinesq equation [26,27]. The equation describes the propagation of gravity waves on the surface of water, especially the head-on collision of oblique waves.
2. Conformable Derivative and Its Characteristics
- (1)
- .
- (2)
- .
- (3)
- .
- (4)
- .
- (5)
- , provided that is differentiable.
3. Algorithm of the Auxiliary Equation Method
4. Applications of the Method
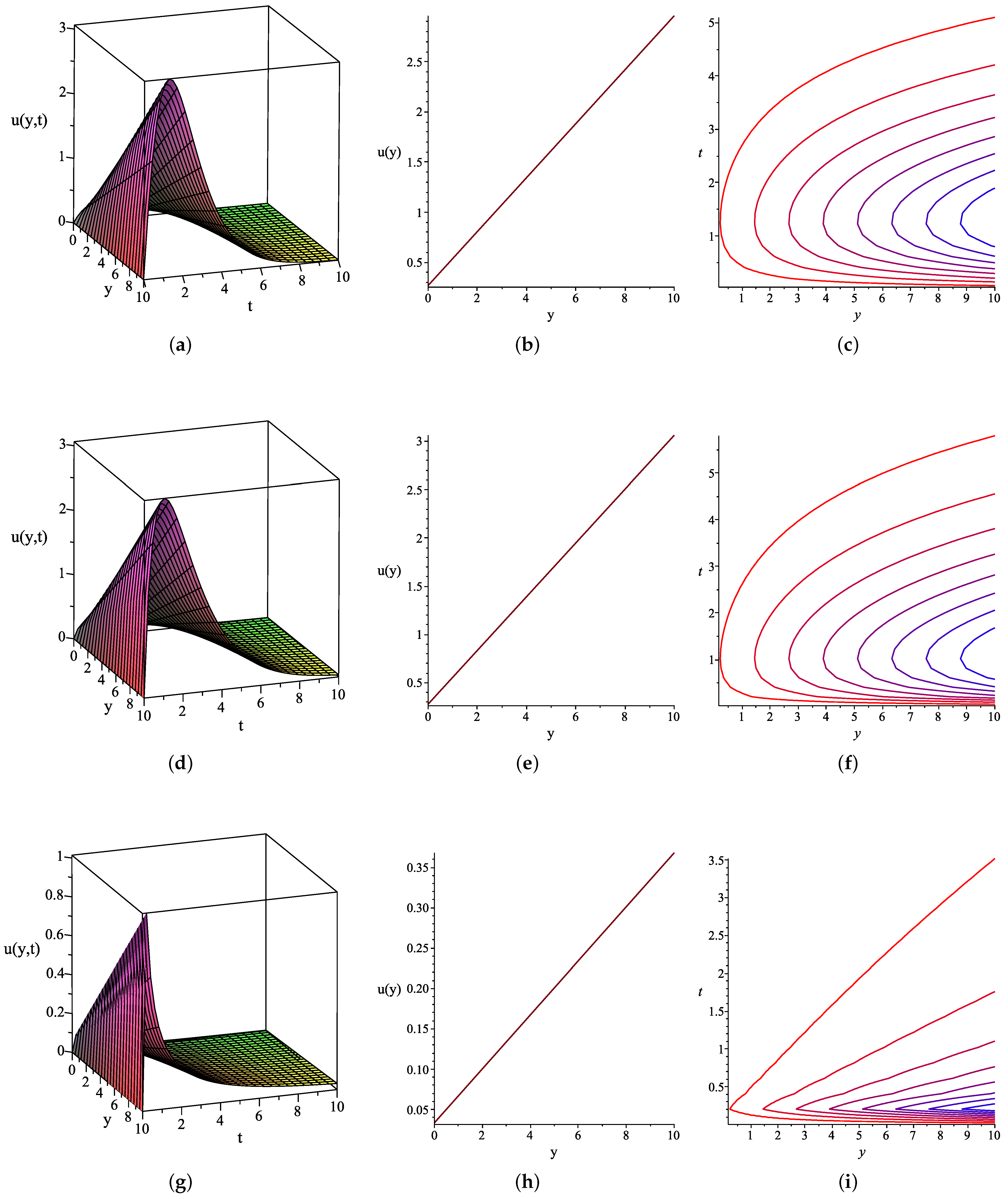
4.1. Conformable Time (2 + 1)-Dimensional Kadomtsev–Petviashvili Equation
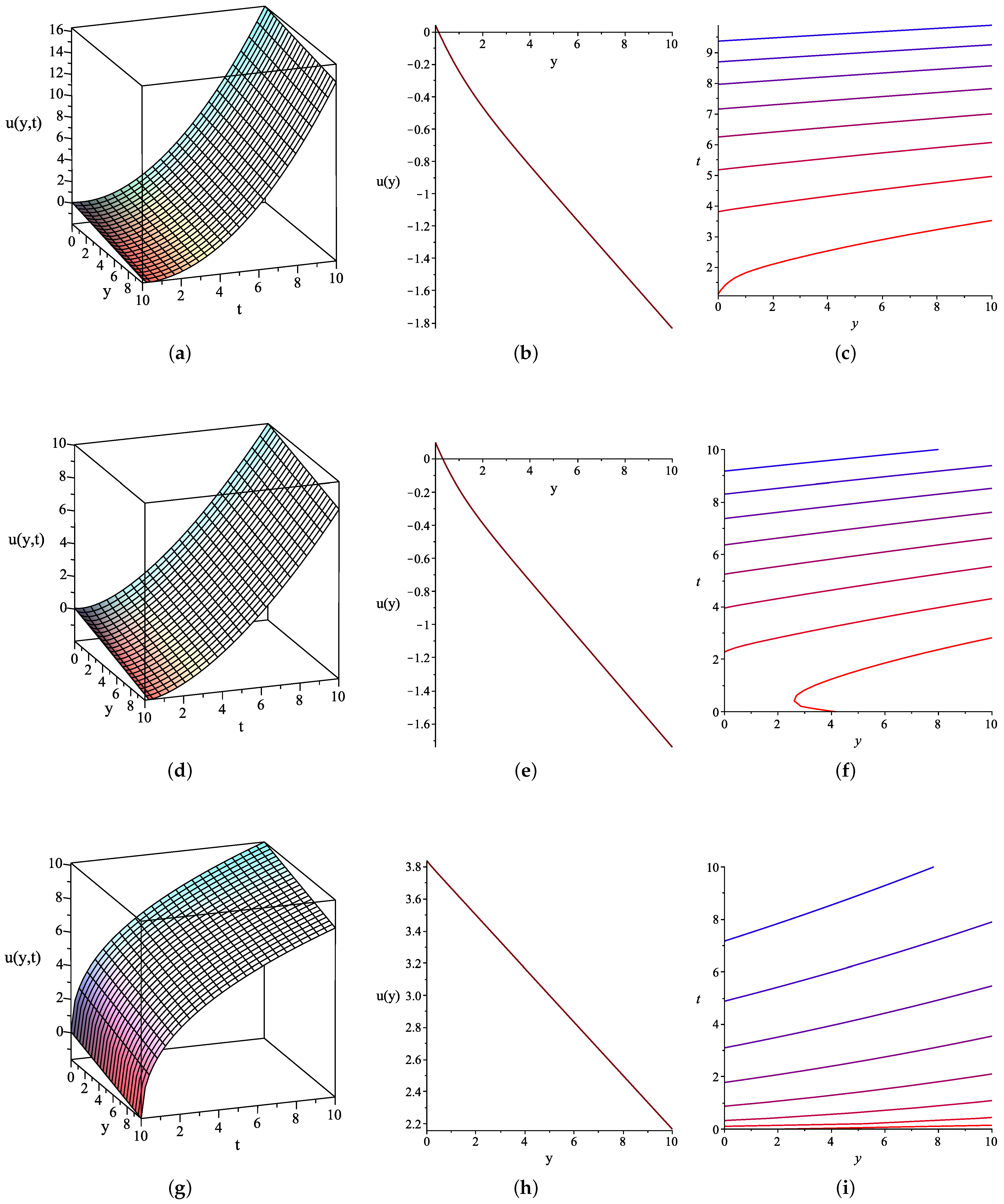
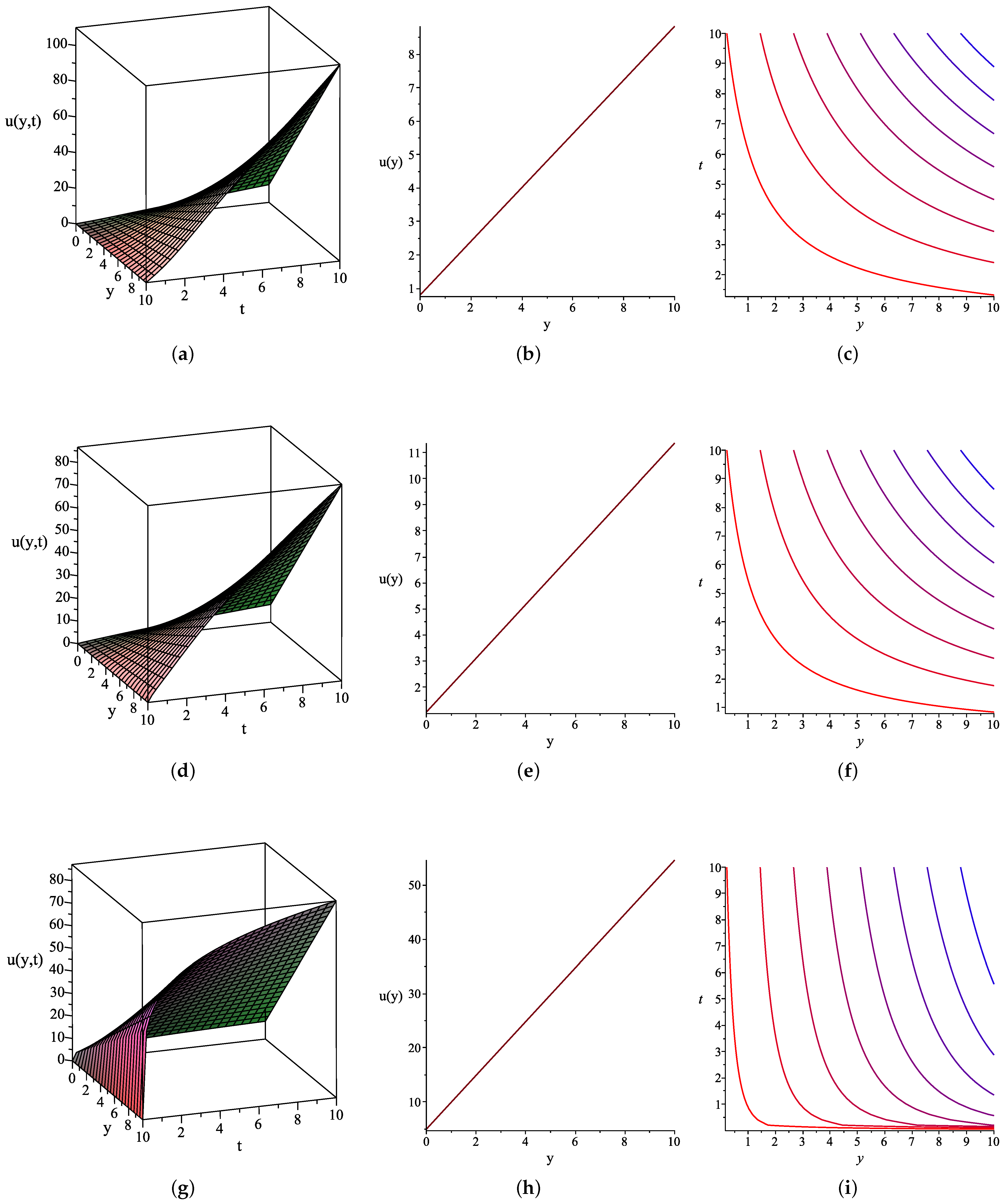
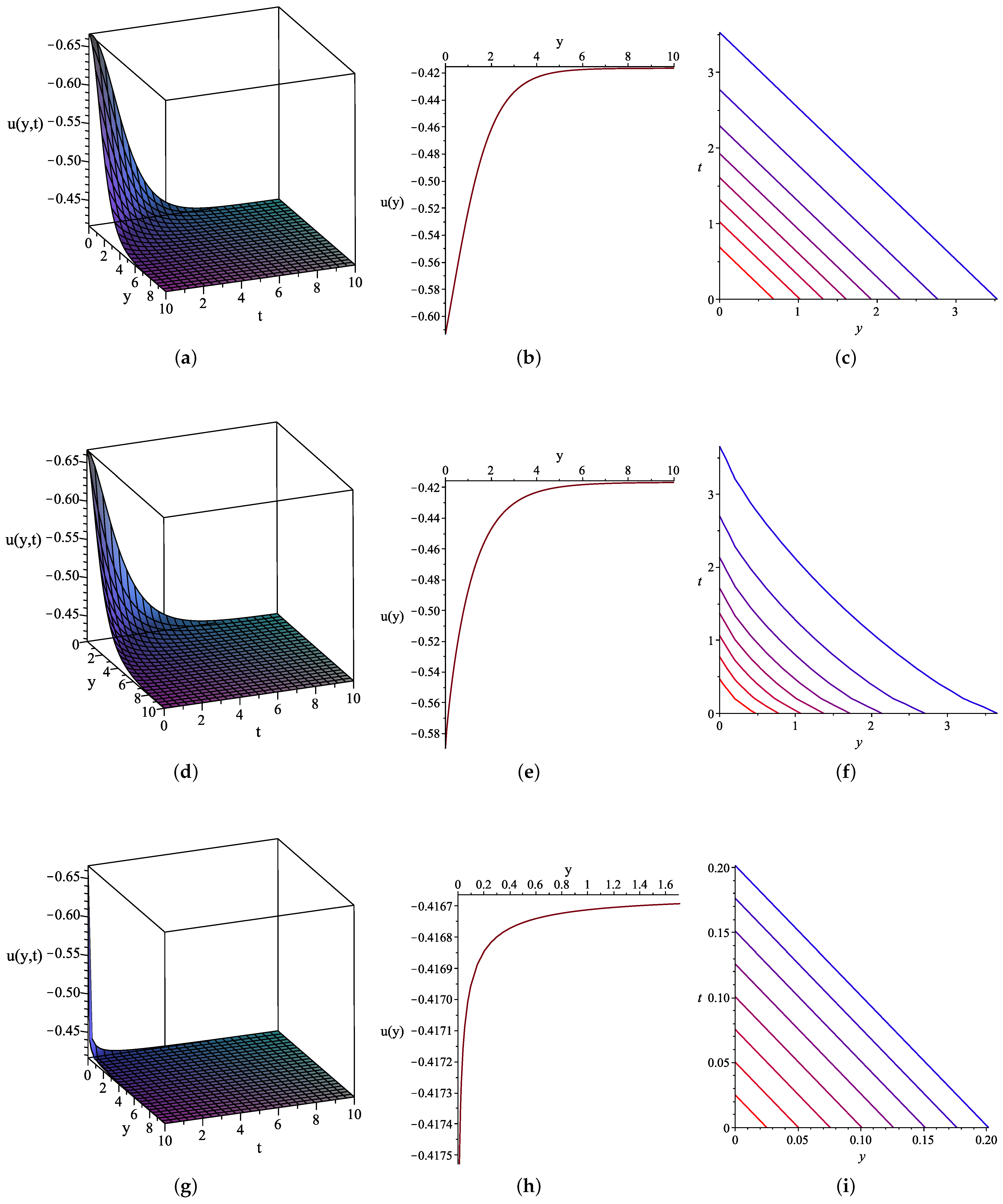
4.2. Conformable Space–Time (2 + 1)-Dimensional Boussinesq Equation
5. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ali, M.R.; Ma, W.X. New exact solutions of nonlinear (3+1)-dimensional Boiti-Leon-Manna-Pempinelli equation. Adv. Math. Phys. 2019, 2019, 9801638. [Google Scholar] [CrossRef] [Green Version]
- Gepreel, K.A. Analytical Methods for Nonlinear Evolution Equations in Mathematical Physics. Mathematics 2020, 8, 2211. [Google Scholar] [CrossRef]
- Alharbi, A.; Almatrafi, M.B. Exact and numerical solitary wave structures to the variant Boussinesq system. Symmetry 2020, 12, 1473. [Google Scholar] [CrossRef]
- Li, Y.; Teng, Z.; Hu, C.; Ge, Q. Global stability of an epidemic model with age-dependent vaccination, latent and relapse. Chaos Solitons Fractals 2017, 105, 195–207. [Google Scholar] [CrossRef]
- Pananu, K.; Sungnul, S.; Sirisubtawee, S.; Phongthanapanich, S. Convergence and Applications of the Implicit Finite Difference Method for Advection-Diffusion-Reaction Equations. IAENG Int. J. Comput. Sci. 2020, 47, 645–663. [Google Scholar]
- Miah, M.M.; Ali, H.S.; Akbar, M.A.; Seadawy, A.R. New applications of the two variable (G′/G,1/G)–expansion method for closed form traveling wave solutions of integro-differential equations. J. Ocean. Eng. Sci. 2019, 4, 132–143. [Google Scholar] [CrossRef]
- Yokus, A.; Durur, H.; Ahmad, H.; Thounthong, P.; Zhang, Y.F. Construction of exact traveling wave solutions of the Bogoyavlenskii equation by (G′/G,1/G)–expansion and (1/G′)–expansion techniques. Results Phys. 2020, 19, 103409. [Google Scholar] [CrossRef]
- Yokuş, A.; Durur, H.; Abro, K.A.; Kaya, D. Role of Gilson–Pickering equation for the different types of soliton solutions: A nonlinear analysis. Eur. Phys. J. Plus 2020, 135, 1–19. [Google Scholar] [CrossRef]
- Wan, P.; Manafian, J.; Ismael, H.F.; Mohammed, S.A. Investigating one-, two-, and triple-wave solutions via multiple exp-function method arising in engineering sciences. Adv. Math. Phys. 2020, 2020. [Google Scholar] [CrossRef]
- Hosseini, K.; Mirzazadeh, M.; Osman, M.; Al Qurashi, M.; Baleanu, D. Solitons and Jacobi elliptic function solutions to the complex Ginzburg–Landau equation. Front. Phys. 2020, 8, 225. [Google Scholar] [CrossRef]
- Tala-Tebue, E.; Rezazadeh, H.; Eslami, M.; Bekir, A. New approach to model coupled nerve fibers and exact solutions of the system. Chin. J. Phys. 2019, 62, 179–186. [Google Scholar] [CrossRef]
- Yue, C.; Lu, D.; Arshad, M.; Nasreen, N.; Qian, X. Bright-Dark and Multi Solitons Solutions of (3+1)-Dimensional Cubic-Quintic Complex Ginzburg–Landau Dynamical Equation with Applications and Stability. Entropy 2020, 22, 202. [Google Scholar] [CrossRef] [Green Version]
- Pinar, Z. The combination of conservation laws and auxiliary equation method. Int. J. Appl. Comput. Math. 2020, 6, 1–7. [Google Scholar] [CrossRef]
- Mahak, N.; Akram, G. The modified auxiliary equation method to investigate solutions of the perturbed nonlinear Schrödinger equation with Kerr law nonlinearity. Optik 2020, 207, 164467. [Google Scholar] [CrossRef]
- Rezazadeh, H.; Korkmaz, A.; Eslami, M.; Mirhosseini-Alizamini, S.M. A large family of optical solutions to Kundu–Eckhaus model by a new auxiliary equation method. Opt. Quantum Electron. 2019, 51, 1–12. [Google Scholar] [CrossRef]
- Akbulut, A.; Kaplan, M. Auxiliary equation method for time-fractional differential equations with conformable derivative. Comput. Math. Appl. 2018, 75, 876–882. [Google Scholar] [CrossRef]
- Khater, M.M.; Seadawy, A.R.; Lu, D. New optical soliton solutions for nonlinear complex fractional Schrödinger equation via new auxiliary equation method and novel (G′/G,1/G)-expansion method. Pramana 2018, 90, 1–20. [Google Scholar] [CrossRef]
- Meng, F.; Feng, Q. Exact solutions with variable coefficient function forms for conformable fractional partial differential equations by an auxiliary equation method. Adv. Math. Phys. 2018, 2018. [Google Scholar] [CrossRef] [Green Version]
- Lu, D.; Seadawy, A.R.; Iqbal, M. Mathematical methods via construction of traveling and solitary wave solutions of three coupled system of nonlinear partial differential equations and their applications. Results Phys. 2018, 11, 1161–1171. [Google Scholar] [CrossRef]
- Pinar, Z.; Kocak, H. Exact solutions for the third-order dispersive-Fisher equations. Nonlinear Dyn. 2018, 91, 421–426. [Google Scholar] [CrossRef]
- Owyed, S.; Abdou, M.; Abdel-Aty, A.H.; Ray, S.S. New optical soliton solutions of nolinear evolution equation describing nonlinear dispersion. Commun. Theor. Phys. 2019, 71, 1063. [Google Scholar] [CrossRef]
- Durur, H.; Tasbozan, O.; Kurt, A. New analytical solutions of conformable time fractional bad and good modified Boussinesq equations. Appl. Math. Nonlinear Sci. 2020, 5, 447–454. [Google Scholar] [CrossRef]
- Xu, Z.; Chen, H.; Dai, Z. Rogue wave for the (2 + 1)-dimensional Kadomtsev–Petviashvili equation. Appl. Math. Lett. 2014, 37, 34–38. [Google Scholar] [CrossRef]
- Ghanbari, B.; Liu, J.G. Exact solitary wave solutions to the (2 + 1)-dimensional generalised Camassa–Holm–Kadomtsev–Petviashvili equation. Pramana 2020, 94, 1–11. [Google Scholar] [CrossRef]
- Zhang, Z.; Yang, X.; Li, W.; Li, B. Trajectory equation of a lump before and after collision with line, lump, and breather waves for (2 + 1)-dimensional Kadomtsev–Petviashvili equation. Chin. Phys. B 2019, 28, 110201. [Google Scholar] [CrossRef]
- Lu, D.; Seadawy, A.R.; Ahmed, I. Applications of mixed lump-solitons solutions and multi-peaks solitons for newly extended (2 + 1)-dimensional Boussinesq wave equation. Mod. Phys. Lett. 2019, 33, 1950363. [Google Scholar] [CrossRef]
- Feng, L.L.; Tian, S.F.; Zhang, T.T. Bäcklund transformations, nonlocal symmetries and soliton–cnoidal interaction solutions of the (2 + 1)-dimensional Boussinesq Equation. Bull. Malays. Math. Sci. Soc. 2020, 43, 141–155. [Google Scholar] [CrossRef]
- Khalil, R.; Horani, M.A.; Yousef, A.; Sababheh, M. A new definition of fractional derivative. J. Comput. Appl. Math. 2014, 264, 65–70. [Google Scholar] [CrossRef]
- Kumar, D.; Seadawy, A.R.; Joardar, A.K. Modified Kudryashov method via new exact solutions for some conformable fractional differential equations arising in mathematical biology. Chin. J. Phys. 2018, 56, 75–85. [Google Scholar] [CrossRef]
- Rezazadeh, H.; Korkmaz, A.; Eslami, M.; Vahidi, J.; Asghari, R. Traveling wave solution of conformable fractional generalized reaction Duffing model by generalized projective Riccati equation method. Opt. Quantum Electron. 2018, 50, 1–13. [Google Scholar] [CrossRef]
- Sirisubtawee, S.; Koonprasert, S.; Sungnul, S. Some Applications of the (G′/G,1/G)–Expansion Method for Finding Exact Traveling Wave Solutions of Nonlinear Fractional Evolution Equations. Symmetry 2019, 11, 952. [Google Scholar] [CrossRef] [Green Version]
- Sirisubtawee, S.; Koonprasert, S.; Sungnul, S.; Leekparn, T. Exact traveling wave solutions of the space–time fractional complex Ginzburg–Landau equation and the space-time fractional Phi-4 equation using reliable methods. Adv. Differ. Equ. 2019, 2019, 1–23. [Google Scholar] [CrossRef]
- Sirisubtawee, S.; Koonprasert, S.; Sungnul, S. New Exact Solutions of the Conformable Space-Time Sharma–Tasso–Olver Equation Using Two Reliable Methods. Symmetry 2020, 12, 644. [Google Scholar] [CrossRef] [Green Version]
- Topsakal, M.; TaŞcan, F. Exact Travelling Wave Solutions for Space-Time Fractional Klein-Gordon Equation and (2 + 1)-Dimensional Time-Fractional Zoomeron Equation via Auxiliary Equation Method. Appl. Math. Nonlinear Sci. 2020, 5, 437–446. [Google Scholar] [CrossRef]
- Clarkson, P.A. New similarity solutions for the modified Boussinesq equation. J. Phys. Math. Gen. 1989, 22, 2355. [Google Scholar] [CrossRef]
- Clarkson, P.A.; Kruskal, M.D. New similarity reductions of the Boussinesq equation. J. Math. Phys. 1989, 30, 2201–2213. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sirisubtawee, S.; Thamareerat, N.; Iatkliang, T. Variable Coefficient Exact Solutions for Some Nonlinear Conformable Partial Differential Equations Using an Auxiliary Equation Method. Computation 2021, 9, 31. https://0-doi-org.brum.beds.ac.uk/10.3390/computation9030031
Sirisubtawee S, Thamareerat N, Iatkliang T. Variable Coefficient Exact Solutions for Some Nonlinear Conformable Partial Differential Equations Using an Auxiliary Equation Method. Computation. 2021; 9(3):31. https://0-doi-org.brum.beds.ac.uk/10.3390/computation9030031
Chicago/Turabian StyleSirisubtawee, Sekson, Nuntapon Thamareerat, and Thitthita Iatkliang. 2021. "Variable Coefficient Exact Solutions for Some Nonlinear Conformable Partial Differential Equations Using an Auxiliary Equation Method" Computation 9, no. 3: 31. https://0-doi-org.brum.beds.ac.uk/10.3390/computation9030031