Closing the Wearable Gap—Part VI: Human Gait Recognition Using Deep Learning Methodologies

 , ,
, ,  ,
,  , and
, and
Abstract
:1. Introduction
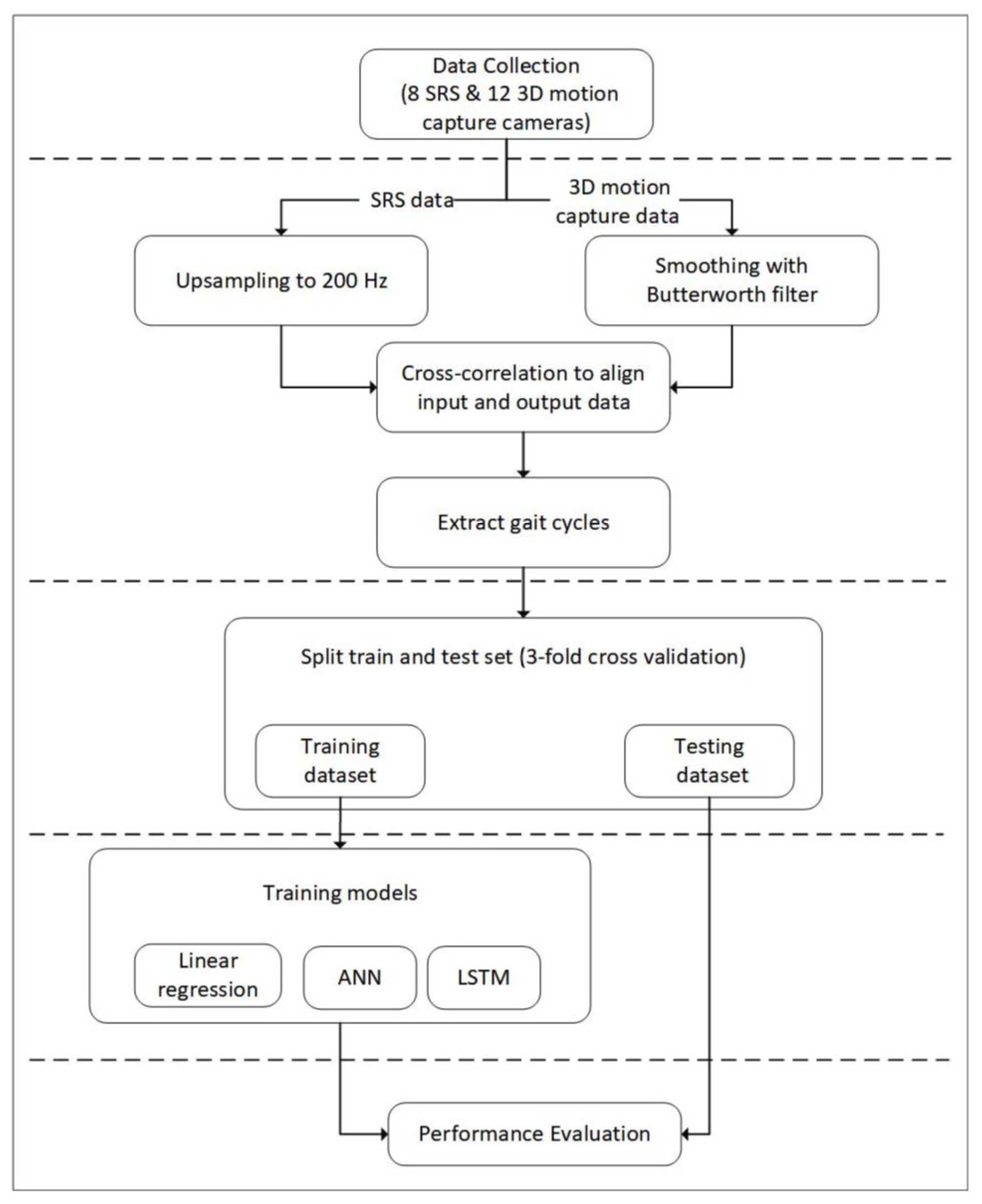
2. Materials and Methods
2.1. Dataset
2.2. Data Preprocessing
2.3. Experimental Procedures
2.3.1. Multivariable Linear Regression
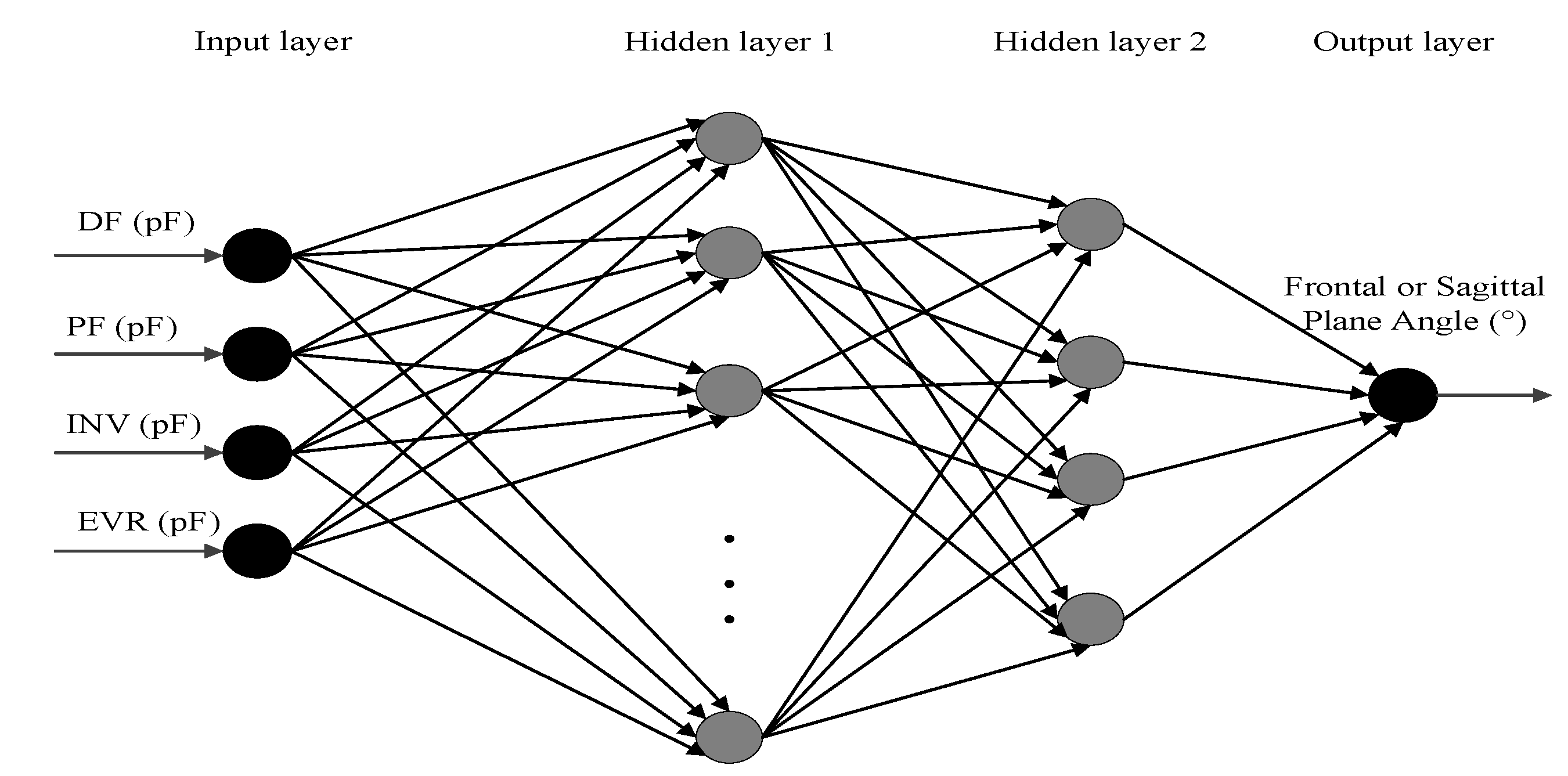
2.3.2. Artificial Neural Network
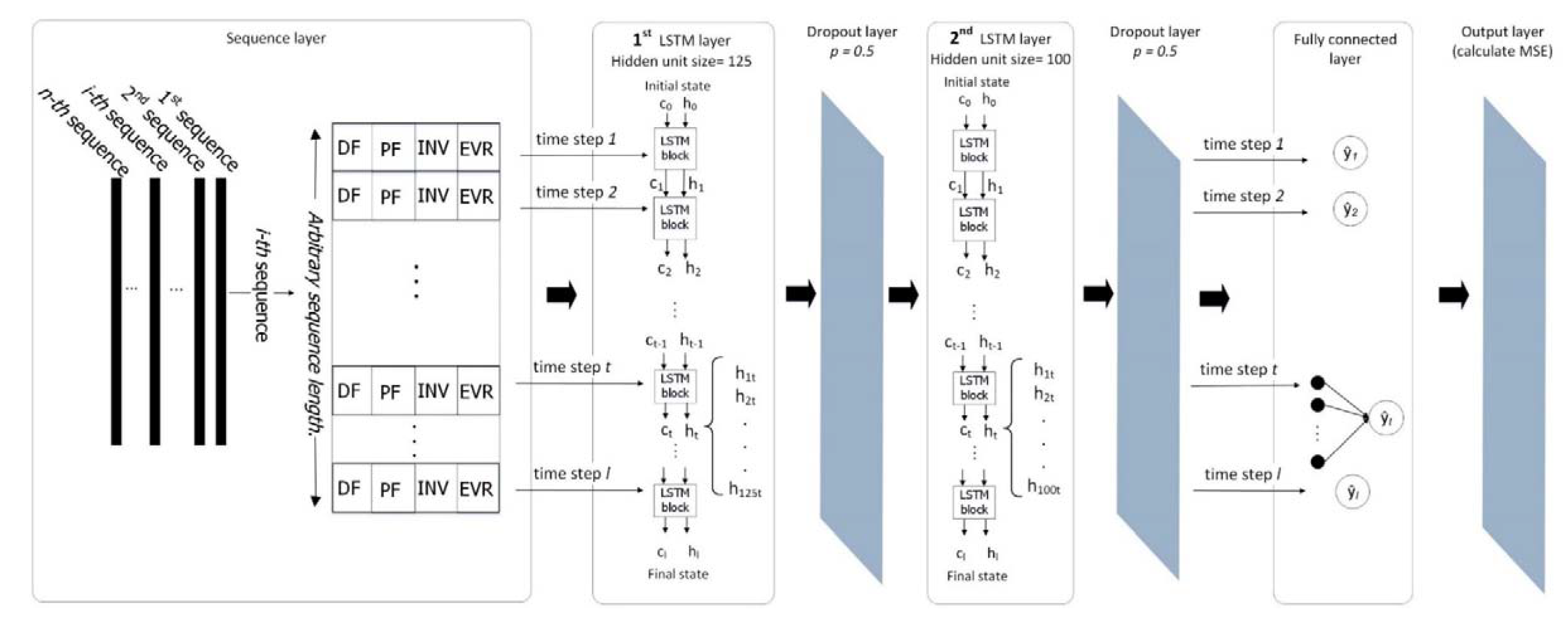
2.3.3. Long Short-Term Memory Network
2.4. Validation
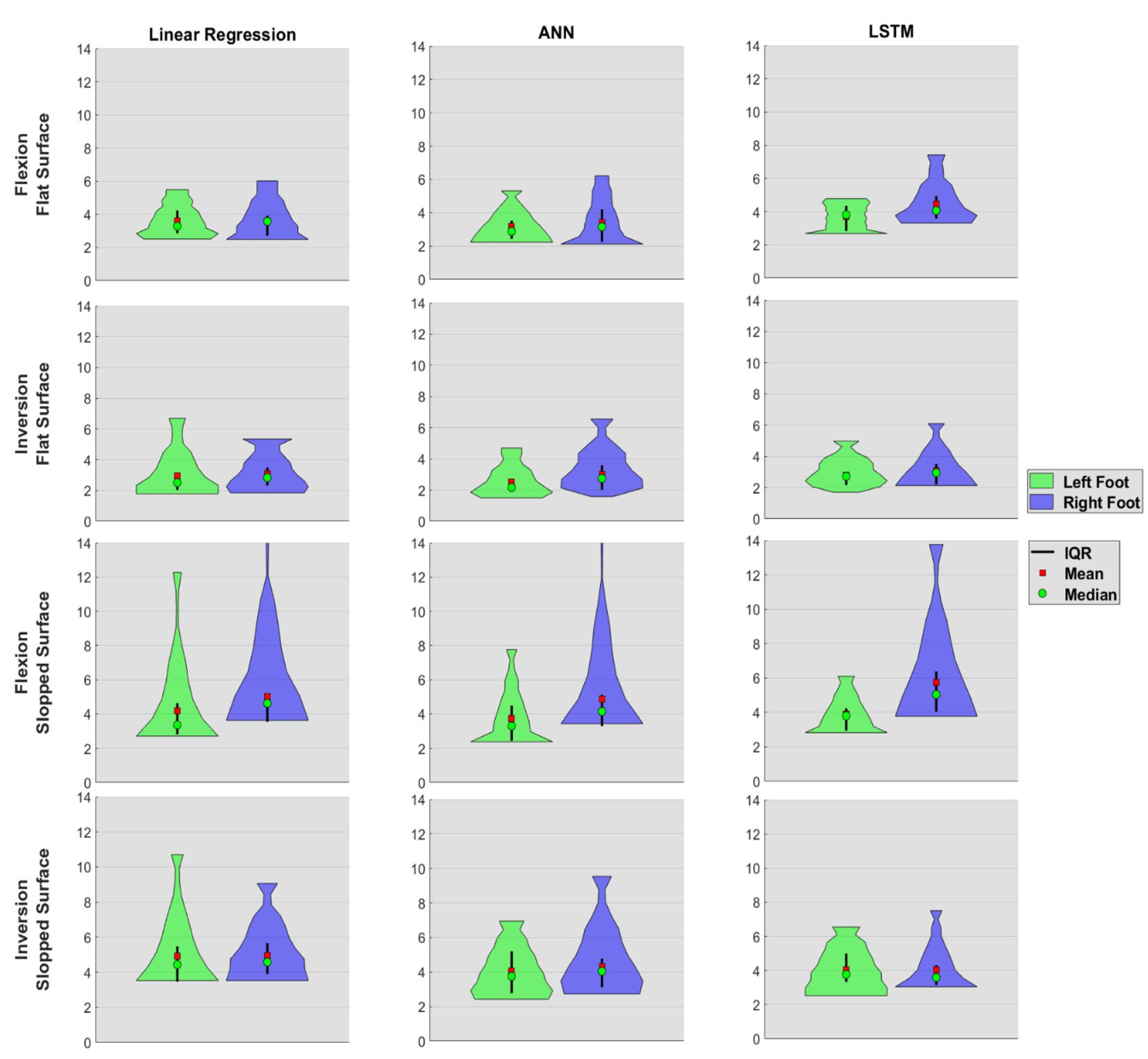
3. Experimental Results and Discussion
4. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hopkins, J.; Son, S.; Kim, H.; Page, G.; Seeley, M. Characterization of Multiple Movement Strategies in Participants with Chronic Ankle Instability. J. Athl. Train. 2019, 54, 698–707. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, H.; Son, S.J.; Seeley, M.K.; Hopkins, J.T. Altered movement biomechanics in chronic ankle instability, coper, and control groups: Energy absorption and distribution implications. J. Athl. Train. 2019, 54, 708–717. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Son, S.; Kim, H.; Seeley, M.; Hopkins, J. Altered Walking Neuromechanics in Patients with Chronic Ankle Instability. J. Athl. Train. 2019, 54, 684–697. [Google Scholar] [CrossRef] [Green Version]
- Zeng, W.; Liu, F.; Wang, Q.; Wang, Y.; Ma, L.; Zhang, Y. Parkinson’s disease classification using gait analysis via deterministic learning. Neurosci. Lett. 2016, 633, 268–278. [Google Scholar] [CrossRef]
- Mazilu, S.; Hardegger, M.; Zhu, Z.; Roggen, D.; Tröster, G.; Plotnik, M.; Hausdorff, J.M. Online detection of freezing of gait with smartphones and machine learning techniques. In Proceedings of the 6th International Conference on Pervasive Computing Technologies for Healthcare and Workshops, San Diego, CA, USA, 21–24 May 2012; pp. 123–130. [Google Scholar]
- Staranowicz, A.; Brown, G.R.; Mariottini, G.L. Evaluating the accuracy of a mobile Kinect-based gait-monitoring system for fall prediction. In ACM International Conference Proceeding Series; Association for Computing Machinery: New York, NY, USA, 2013 May; pp. 1–4. [Google Scholar]
- Senanayake, S.M.N.A.; Chong, V.; Chong, J.; Sirisinghe, G.R. Analysis of soccer actions using wireless accelerometers. In Proceedings of the 4th IEEE International Conference on Industrial Informatics, Singapore, 16–18 August 2006; pp. 664–669. [Google Scholar]
- Ye, M.; Yang, C.; Stanković, V.; Stanković, L.; Kerr, A. A Depth Camera Motion Analysis Framework for Tele-rehabilitation: Motion Capture and Person-Centric Kinematics Analysis. IEEE J. Sel. Top. Signal Process. 2016, 10, 877–887. [Google Scholar] [CrossRef] [Green Version]
- Hesse, S.; Uhlenbrock, D.; Werner, C.; Bardeleben, A. A mechanized gait trainer for restoring gait in nonambulatory subjects. Arch. Phys. Med. Rehabil. 2000, 81, 1158–1161. [Google Scholar] [CrossRef] [PubMed]
- Daniel, P.F.P.; Gregory, S.S.M.; Antoinette, R.D.M.P.T. Powered Lower Limb Orthoses for Gait Rehabilitation. Top. Spinal Cord Inj. Rehabil. 2005, 11, 34–49. [Google Scholar]
- Luczak, T.; Burch, R.; Lewis, E.; Chander, H.; Ball, J. State-of-the-art review of athletic wearable technology: What 113 strength and conditioning coaches and athletic trainers from the USA said about technology in sports. Int. J. Sport. Sci. Coach. 2020, 15, 26–40. [Google Scholar] [CrossRef]
- Winter, D.; Eng, F.; Isshac, M. A review of kinetic parameters in human walking. In Gait Analysis: Theory and Application; Crak, R.L., Oatis, C.A., Eds.; Mosby-Year Book: Louis MO, USA, 1994; pp. 263–265. [Google Scholar]
- Cuccurullo, S. Physical Medicine and Rehabilitation Board Review, 1st ed.; Demos Medical Publishing: New York, NY, USA, 2019. [Google Scholar]
- Fong, D.T.P.; Chan, Y.Y. The use of wearable inertial motion sensors in human lower limb biomechanics studies: A systematic review. Sensors 2010, 10, 11556–11565. [Google Scholar] [CrossRef] [Green Version]
- Mengüç, Y.; Park, Y.-L.; Martinez-Villalpando, E.; Aubin, P.; Zisook, M.; Stirling, L.; Wood, R.J.; Walsh, C.J. Soft wearable motion sensing suit for lower limb biomechanics measurements. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 5309–5316. [Google Scholar]
- Colyer, S.L.; Evans, M.; Cosker, D.P.; Salo, A.I.T. A Review of the Evolution of Vision-Based Motion Analysis and the Integration of Advanced Computer Vision Methods towards Developing a Markerless System. Sport. Med.-Open 2018, 4, 24. [Google Scholar] [CrossRef] [Green Version]
- Majumder, S.; Mondal, T.; Deen, M.J. Wearable sensors for remote health monitoring. Sensors 2017, 17, 130. [Google Scholar] [CrossRef] [PubMed]
- Dejnabadi, H.; Jolles, B.M.; Aminian, K. A new approach to accurate measurement of uniaxial joint angles based on a combination of accelerometers and gyroscopes. IEEE Trans. Biomed. Eng. 2005, 52, 1478–1484. [Google Scholar] [CrossRef] [PubMed]
- Willemsen, A.T.M.; Frigo, C.; Boom, H.B.K. Lower Extremity Angle Measurement with Accelerometers—Error and Sensitivity. IEEE Trans. Biomed. Eng. 1991, 38, 1186–1193. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Heyn, A.; Mayagoitia, R.E.; Nene, A.V.; Veltink, P.H. Kinematics of the swing phase obtained from accelerometer and gyroscope measurements. Annu. Int. Conf. IEEE Eng. Med. Biol.-Proc. 1996, 2, 463–464. [Google Scholar]
- Kriegsman, B.A. Radar-Updated Inertial Navigation of a Continuously-Powered Space Vehicle. IEEE Trans. Aerosp. Electron. Syst. 1966, 4, 549–565. [Google Scholar] [CrossRef]
- Filippeschi, A.; Schmitz, N.; Miezal, M.; Bleser, G.; Ruffaldi, E.; Stricker, D. Survey of motion tracking methods based on inertial sensors: A focus on upper limb human motion. Sensors 2017, 17, 1–40. [Google Scholar]
- Luczak, T.; Saucier, D.; Burch, V.; Reuben, F.; Ball, J.E.; Chander, H.; Knight, A.; Wei, P.; Iftekhar, T. Closing the wearable gap: Mobile systems for kinematic signal monitoring of the foot and ankle. Electronics 2018, 7, 117. [Google Scholar] [CrossRef] [Green Version]
- Saucier, D.; Luczak, T.; Nguyen, P.; Davarzani, S.; Peranich, P.; Ball, J.E.; Burch, V.R.F.; Smith, B.K.; Chander, H.; Knight, A.; et al. Closing the Wearable Gap—Part II: Sensor Orientation and Placement for Foot and Ankle Joint Kinematic Measurements. Sensors 2019, 19, 3509. [Google Scholar] [CrossRef] [Green Version]
- Chander, H.; Stewart, E.; Saucier, D.; Nguyen, P.; Luczak, T.; Ball, J.E.; Knight, A.C.; Smith, B.K.; Burch, V.R.F.; Prabhu, R.K. Closing the wearable gap-part III: Use of stretch sensors in detecting ankle joint kinematics during unexpected and expected slip and trip perturbations. Electronics 2019, 8, 1083. [Google Scholar] [CrossRef] [Green Version]
- Saucier, D.; Davarzani, S.; Turner, A.; Luczak, T.; Nguyen, P.; Carroll, W.; Burch, V.R.F.; Ball, J.R.; Smith, B.K.; Chander, H.; et al. Closing the wearable gap—part IV: 3D motion capture cameras versus soft robotic sensors comparison of gait movement assessment. Electronics 2019, 8, 1382. [Google Scholar] [CrossRef] [Green Version]
- Kelly, S. Basic Anatomical Concepts, Footmaxx. Available online: https://www.footmaxx.com/health-conditions/anatomy-of-the-foot/basic-anatomical-concepts (accessed on 6 December 2019).
- Attal, F.; Mohammed, S.; Dedabrishvili, M.; Chamroukhi, F.; Oukhellou, L.; Amirat, Y. Physical human activity recognition using wearable sensors. Sensors 2015, 15, 31314–31338. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Özdemir, A.T.; Barshan, B. Detecting falls with wearable sensors using machine learning techniques. Sensors 2014, 14, 10691–10708. [Google Scholar] [CrossRef]
- Shibuya, N.; Nukala, B.T.; Rodriguez, A.I.; Tsay, J.; Nguyen, T.Q.; Zupancic, S.; Lie, D.Y. A real-time fall detection system using a wearable gait analysis sensor and a Support Vector Machine (SVM) classifier. In Proceedings of the 8th International Conference on Mobile Computing and Ubiquitous Networking, Hakodate, Japan, 20–22 January 2015; pp. 66–67. [Google Scholar]
- Ojetola, O.; Gaura, E.I.; Brusey, J. Fall detection with wearable sensors—Safe (SmArt Fall dEtection). In Proceedings of the IEEE 7th International Conference on Intelligent Environments, Nottingham, UK, 25–28 July 2011; pp. 318–321. [Google Scholar]
- Sprager, S.; Zazula, D. A cumulant-based method for gait identification using accelerometer data with principal component analysis and support vector machine. WSEAS Trans. Signal Process. 2009, 5, 369–378. [Google Scholar]
- Novak, D.; Reberšek, P.; De Rossi, S.M.M.; Donati, M.; Podobnik, J.; Beravs, T.; Lenzi, T.; Vitiello, N.; Carrozza, M.C.; Munih, M. Automated detection of gait initiation and termination using wearable sensors. Med. Eng. Phys. 2013, 35, 1713–1720. [Google Scholar] [CrossRef]
- Chau, T. A review of analytical techniques for gait data. Part 2: Neural network and wavelet methods. Gait Posture 2001, 13, 102–120. [Google Scholar] [CrossRef]
- Lafuente, R.; Belda, J.M.; Sánchez-Lacuesta, J.; Soler, C.; Prat, J. Design and test of neural networks and statistical classifiers in computer-aided movement analysis: A case study on gait analysis. Clin. Biomech. 1998, 13, 216–229. [Google Scholar] [CrossRef]
- Sepulveda, F.; Wells, D.M.; Vaughan, C.L. A neural network representation of electromyography and joint dynamics in human gait. J. Biomech. 1993, 26, 101–109. [Google Scholar] [CrossRef]
- Gioftsos, G.; Grieve, D.W. The use of neural networks to recognize patterns of human movement: Gait patterns. Clin. Biomech. 1995, 10, 179–183. [Google Scholar] [CrossRef]
- Luczak, T.; Burch, V.; Reuben, F.; Smith, B.K.; Carruth, D.W.; Lamberth, J.; Chander, H.; Knight, A.; Ball, J.E.; Prabhu, R.K. Closing the wearable gap—Part V: Development of a pressure-sensitive sock utilizing soft sensors. Sensors 2020, 20, 208. [Google Scholar] [CrossRef] [Green Version]
- Innovative Sports Training. Available online: https://www.innsport.com (accessed on 15 March 2020).
- Simpson, J.; Stewart, E.; Mosby, A.; Macias, D.; Chander, H.; Knight, A. Lower Extremity Kinematics During Ankle Inversion Perturbations: A Novel Experimental Protocol That Simulates an Unexpected Lateral Ankle Sprain Mechanism. J. Sport Rehabil. 2019, 28, 593–600. [Google Scholar] [CrossRef]
- Simpson, J.D.; Stewart, E.M.; Turner, A.J.; Macias, D.M.; Wilson, S.J.; Chander, H.; Knight, A.C. Neuromuscular control in individuals with chronic ankle instability: A comparison of unexpected and expected ankle inversion perturbations during a single leg drop-landing. Hum. Mov. Sci. 2019, 64, 133–141. [Google Scholar] [CrossRef]
- Winter, D.A. Biomechanical motor patterns in normal walking. J. Mot. Behav. 1983, 15, 302–330. [Google Scholar] [CrossRef] [PubMed]
- Jafari-Marandi, R.; Davarzani, S.; Gharibdousti, M.S.; Smith, B.K. An optimum ANN-based breast cancer diagnosis: Bridging gaps between ANN learning and decision-making goals. Appl. Soft Comput. J. 2018, 72, 108–120. [Google Scholar] [CrossRef]
- Abraham, A. Artificial neural networks. In Handbook of Measuring System Design; Sydenham, P.H., Thorn, R., Eds.; Wiley: London, UK, 2005; Volume 131, pp. 901–908. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural. Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Data | Flat Surface | Cross Sloped Surface | Overall Mean | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Right foot | Left foot | Right foot | Left foot | |||||||
| FLX(°) | INV(°) | FLX(°) | INV(°) | FLX(°) | INV(°) | FLX(°) | INV(°) | (°) | ||
| Linear regression | Train set | 3.27 | 2.76 | 3.17 | 2.51 | 4.15 | 4.01 | 3.27 | 3.70 | 3.36 |
| Test set | 3.62 | 3.09 | 3.62 | 2.97 | 5.02 | 4.95 | 4.16 | 4.93 | 4.05 | |
| ANN | Train set | 2.67 | 2.25 | 2.53 | 1.97 | 3.64 | 3.17 | 2.67 | 2.86 | 2.72 |
| Test set | 3.40 | 2.99 | 3.16 | 2.51 | 4.85 | 4.32 | 3.74 | 4.05 | 3.63 | |
| LSTM | Train set | 4.58 | 2.64 | 3.37 | 2.46 | 5.61 | 3.63 | 3.78 | 3.59 | 3.71 |
| Test set | 4.47 | 3.08 | 3.70 | 2.80 | 5.74 | 4.05 | 4.06 | 3.89 | 3.98 | |
| Method | Data | Flat Surface | Cross Sloped Surface | Overall Std | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Right foot | Left foot | Right foot | Left foot | |||||||
| FLX(°) | INV(°) | FLX(°) | INV(°) | FLX(°) | INV(°) | FLX(°) | INV(°) | (°) | ||
| Linear regression | Train set | 0.85 | 0.78 | 0.70 | 0.95 | 1.82 | 1.03 | 0.89 | 0.89 | 0.99 |
| Test set | 1.11 | 1.03 | 0.92 | 1.41 | 2.92 | 1.45 | 2.27 | 1.87 | 1.62 | |
| ANN | Train set | 2.67 | 2.25 | 2.53 | 1.97 | 3.64 | 3.17 | 2.67 | 2.86 | 2.72 |
| Test set | 1.28 | 1.24 | 0.84 | 0.97 | 2.94 | 1.69 | 1.49 | 1.31 | 1.47 | |
| LSTM | Train set | 1.11 | 0.96 | 0.78 | 0.66 | 1.84 | 1.01 | 1.09 | 1.03 | 1.06 |
| Test set | 1.27 | 1.01 | 0.72 | 0.76 | 2.38 | 1.26 | 1.20 | 0.96 | 1.20 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Davarzani, S.; Saucier, D.; Peranich, P.; Carroll, W.; Turner, A.; Parker, E.; Middleton, C.; Nguyen, P.; Robertson, P.; Smith, B.; et al. Closing the Wearable Gap—Part VI: Human Gait Recognition Using Deep Learning Methodologies. Electronics 2020, 9, 796. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics9050796
Davarzani S, Saucier D, Peranich P, Carroll W, Turner A, Parker E, Middleton C, Nguyen P, Robertson P, Smith B, et al. Closing the Wearable Gap—Part VI: Human Gait Recognition Using Deep Learning Methodologies. Electronics. 2020; 9(5):796. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics9050796
Chicago/Turabian StyleDavarzani, Samaneh, David Saucier, Preston Peranich, Will Carroll, Alana Turner, Erin Parker, Carver Middleton, Phuoc Nguyen, Preston Robertson, Brian Smith, and et al. 2020. "Closing the Wearable Gap—Part VI: Human Gait Recognition Using Deep Learning Methodologies" Electronics 9, no. 5: 796. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics9050796